




Navigation
- Quadruped Robot Navigation & Control
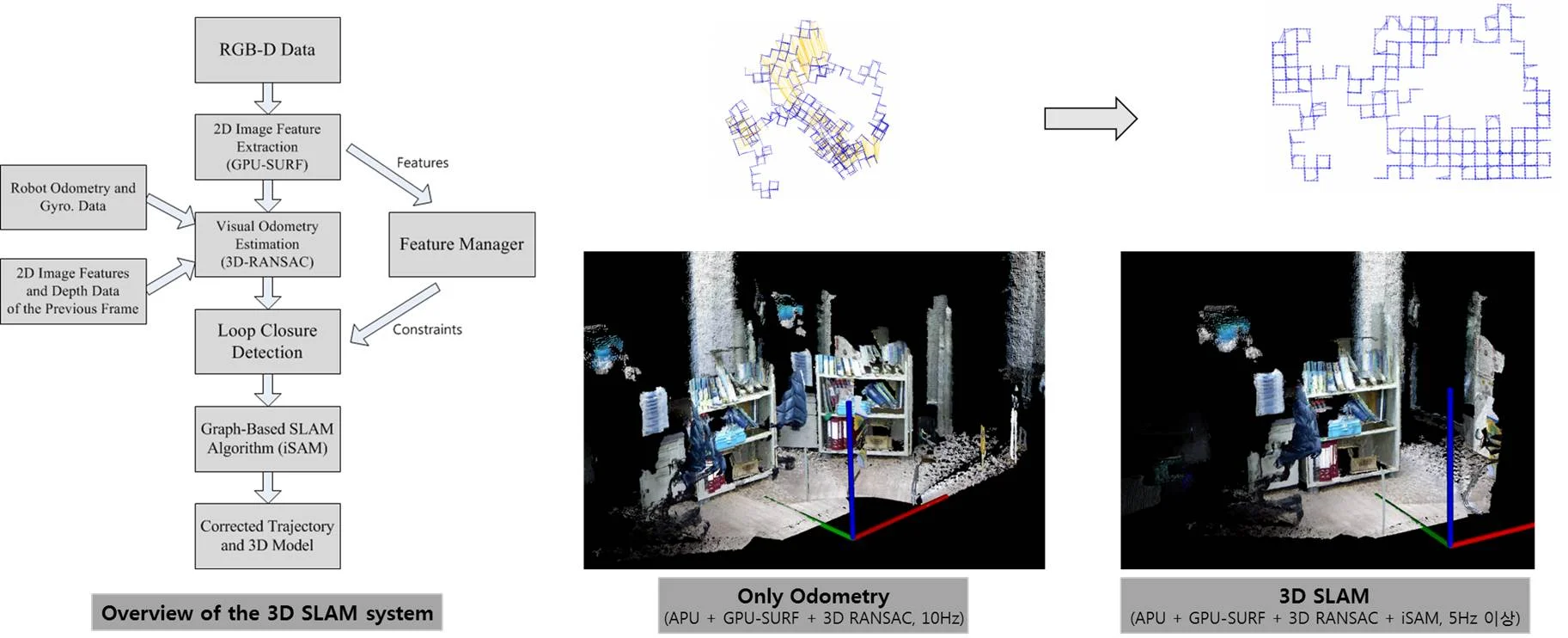
- 3D SLAM
- Autonomous Navigation
- Magnetic field-based SLAM
- MAV (quadrotor) Navigation & Control
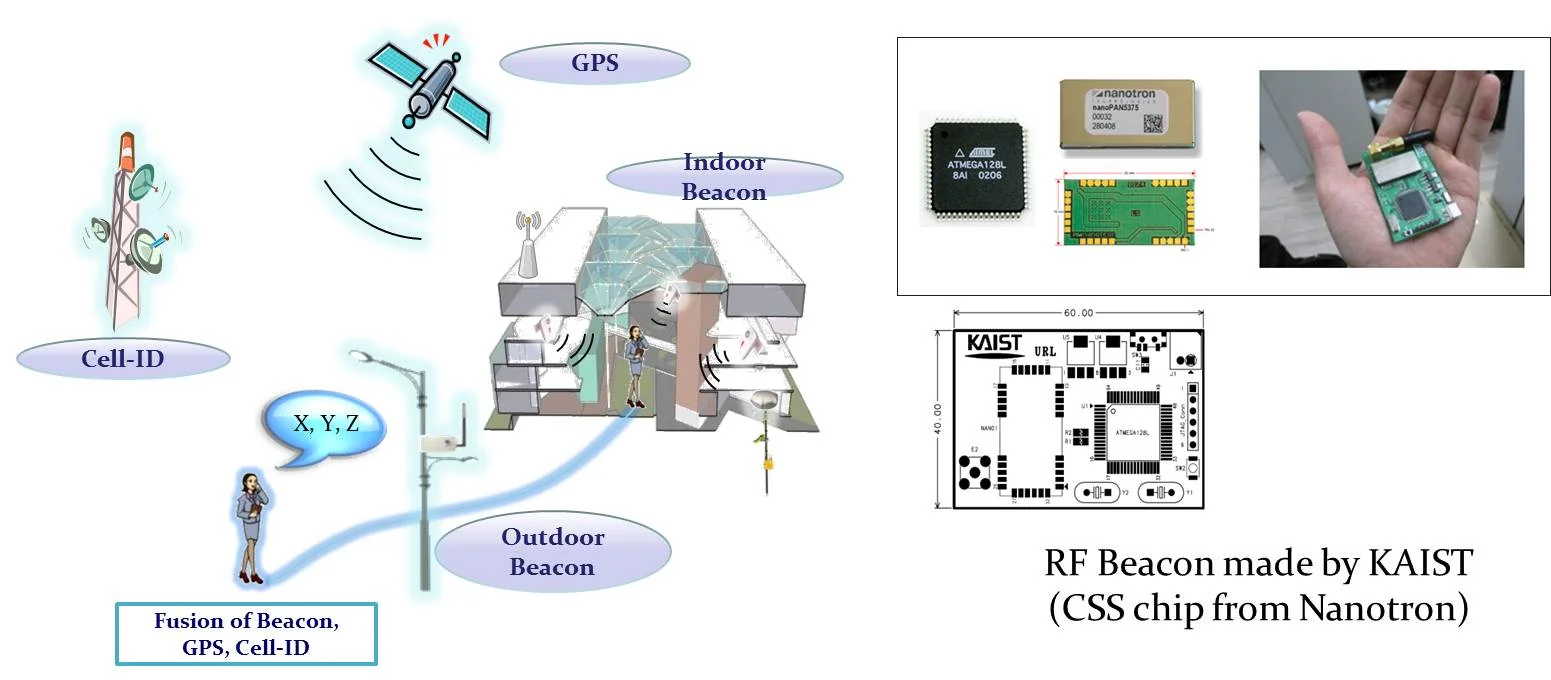
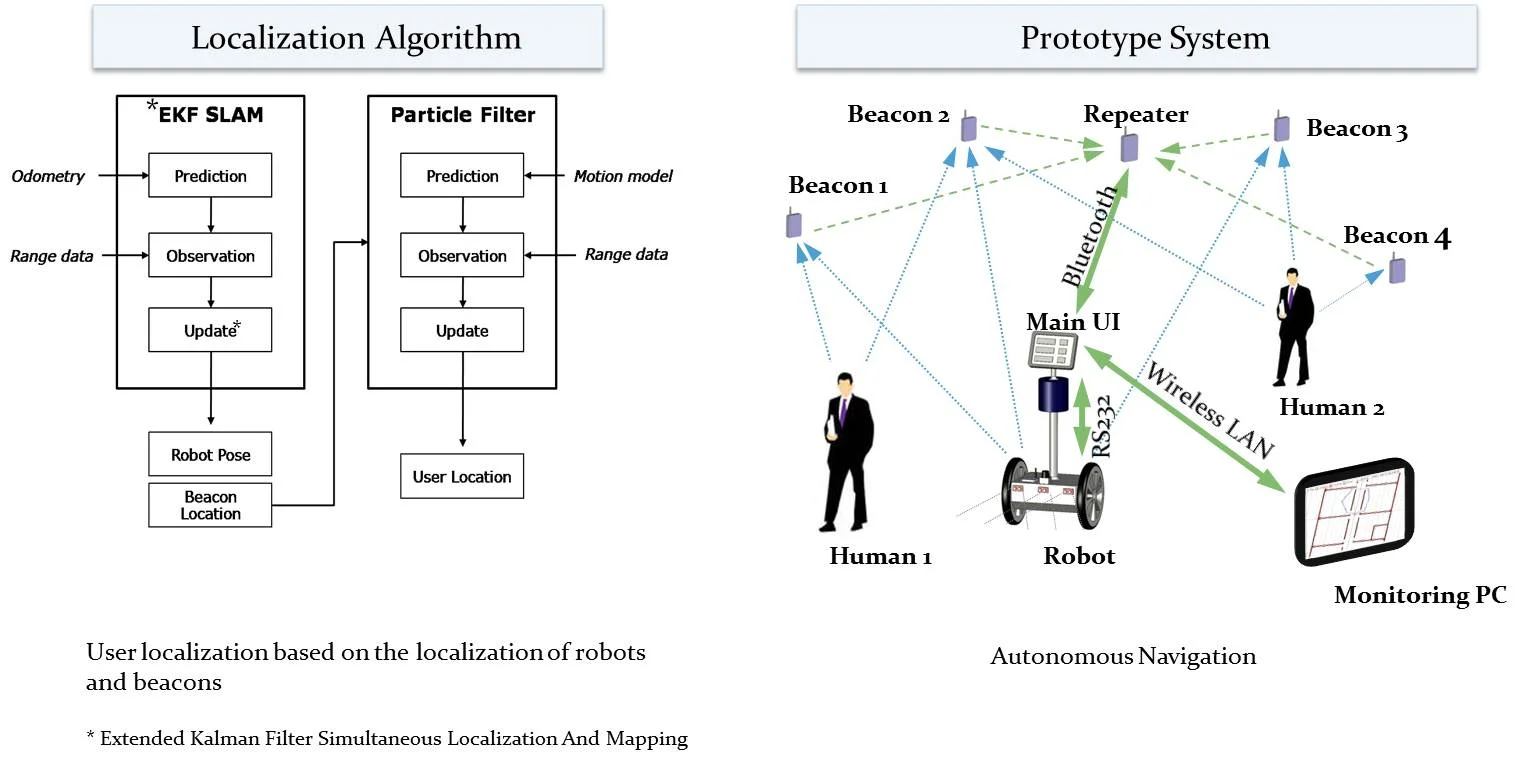
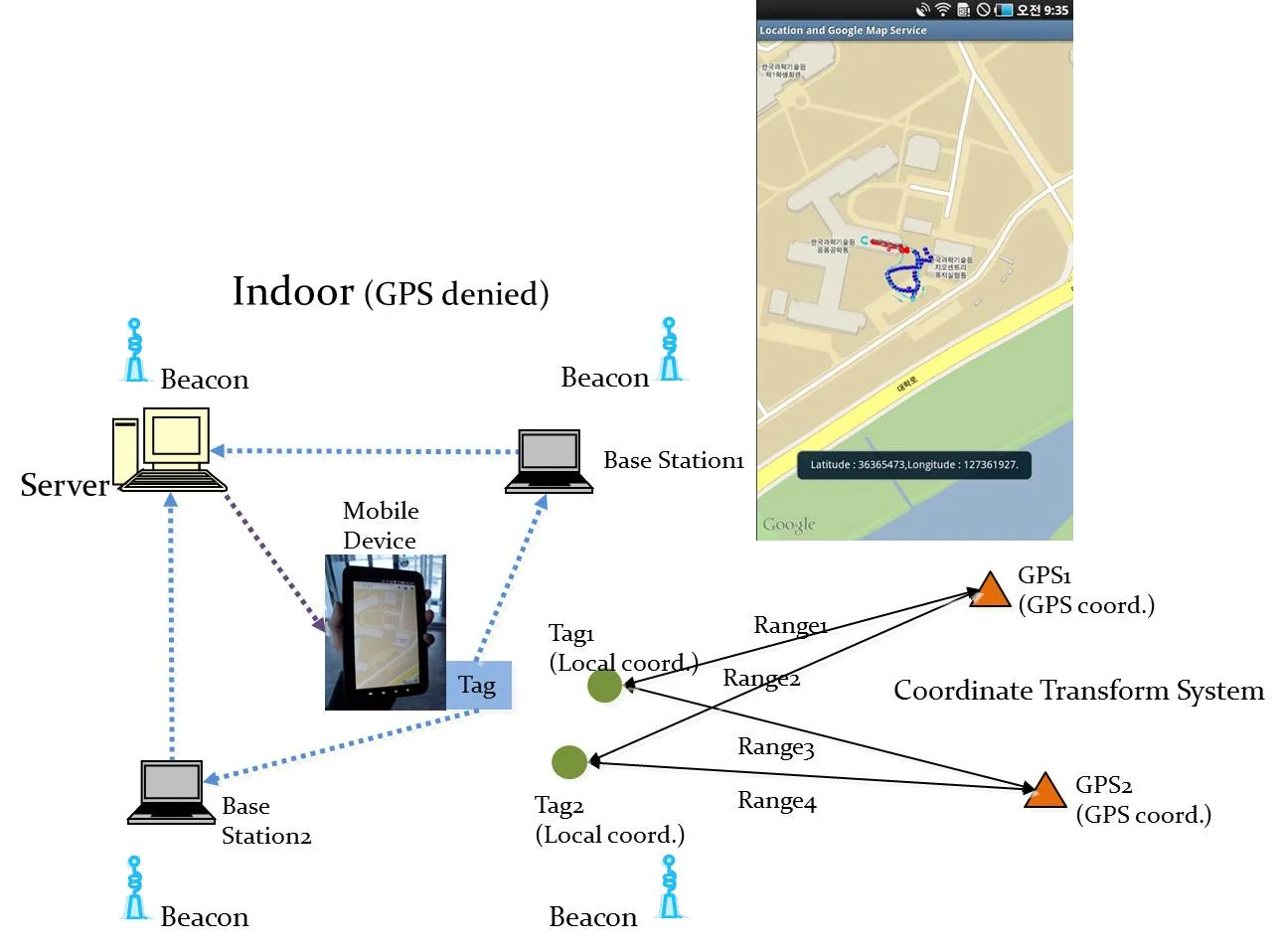
- Seamless Localization at Indoor/Outdoor for U-Eco City
- Robotic Fish (Fibo) for Aquarium
- JEROS (Jellyfish Elimination RObotic Swarm)
- Formation Control for Swarm Robots
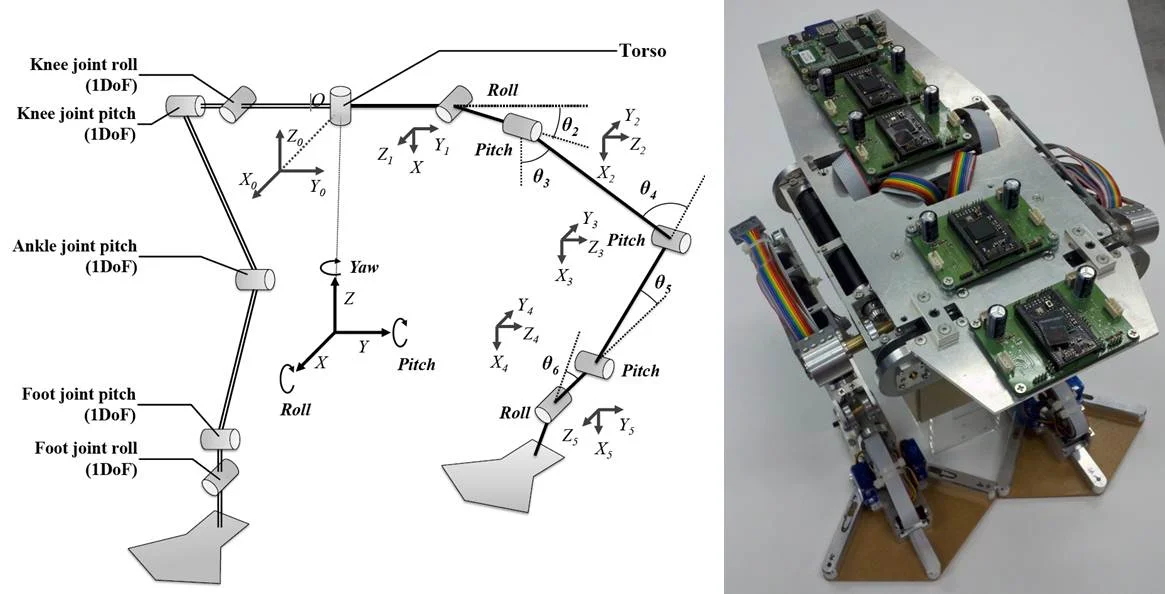
- Bird-like Biped Robot for Rough Terrain
Quadruped Robot Navigation & Control
- Blind locomotion using IMU and joint encoders with machine learning techniques
- Exteroception & proprioception sensing based state estimation
- Terrain mapping
- Local & global planning
- LiDAR-Visual-Inertial-Kinematic odometry, Tightly-coupled sensor fusion
Related papers
- Kevin Christiansen Marsim, Minho Oh, Byeongho Yu, Seungjae Lee, I Made Aswin Nahrendra, Hyungtae Lim, and Hyun Myung†, “LVI-Q: Robust LiDAR-Visual-Inertial-Kinematic Odometry for Quadruped Robots Using Tightly-Coupled and Efficient Alternating Optimization," IEEE RA-L (Robotics and Automation Letters), vol.10, no.10, pp.10050-10057, Oct. 2025. [Link]
- I Made Aswin Nahrendra, Minho Oh, Byeongho Yu, Hyungtae Lim, and Hyun Myung, “Robust Recovery Motion Control for Quadrupedal Robots via Learned Terrain Imagination," in Proc. Robotics: Science and Systems (RSS 2023) Workshop, Daegu, Korea, Jul. 2023. [Link]
- I Made Aswin Nahrendra, Byeongho Yu, and Hyun Myung, “DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning ," in Proc. IEEE Int’l Conf. on Robotics and Automation (ICRA), pp. 5078-5084, London, UK, May 2023. [Link]
- Yeeun Kim, Byeongho Yu, Eungchang Mason Lee, Joon-ha Kim, Hae-won Park, and Hyun Myung, “STEP: State Estimator for Legged Robots Using a Preintegrated Foot Velocity Factor," IEEE RA-L (Robotics and Automation Letters), vol.7, no.2, pp.4456 – 4463, Apr. 2022. [Link]


3D SLAM
- 3D SLAM for low dynamic environment
- Object recognition
- Optimal path planning and replanning
- Dynamic obstacle avoidance
- LiDAR-Inertial Odomtery: Adaptive & degeneracy-aware odometry, SE(3) manifold IMU propagation
- Visual-Inertial Odometry: Dynamic env. state estimation, Line-based SLAM with vanishing points
- Monocular foundation model-based keyframe prioritization
- Multi-session SLAM, Loop closing, Multi-robot localization, Change detection
- Hierarchical graph SLAM, RGB-D grouping/pruning, Ground segmentation, Dynamic object removal
Related papers
- Jinwoo Jeon, Dong-Uk Seo, Eungchang Mason Lee, Hyun Myung*, “AIM-SLAM: Dense Monocular SLAM via Adaptive and Informative Multi-View Keyframe Prioritization with Foundation Model", in Proc. IEEE Int'l Conf. on Robotics and Automation (ICRA), 2026. (Accepted)
- Gunhee Shin, Seungjae Lee, Jei Kong, Young-Woo Seo, Hyun Myung*, “Smooth IMU Propagation With Jointly Distributed Poses on SE(3) Manifold for Accurate and Robust LiDAR-Inertial Odometry", in Proc. IEEE Int'l Conf. on Robotics and Automation (ICRA), 2026. (Accepted)
- Seoyeon Jang, Alex Lee, I Made Aswin Nahrendra, and Hyun Myung†, “Chamelion : Reliable Change Detection for Long-Term LiDAR Mapping in Transient Environments," IEEE RA-L (Robotics and Automation Letters), vol.11, no.4, pp.4361-4368, Feb. 2026. [Link]
- Hyungtae Lim†, Daebeom Kim†, and Hyun Myung†, “Multi-Mapcher: Loop Closure Detection-Free Heterogeneous LiDAR Multi-Session SLAM Leveraging Outlier-Robust Registration for Autonomous Vehicles," IEEE T-IV (Transactions on Intelligent Vehicles), vol.11, no.3, pp.338-351, Feb. 2026. [Link]
- Eungchang Mason Lee, Kevin Christiansen Marsim, and Hyun Myung†, “LODESTAR: Degeneracy-Aware LiDAR-Inertial Odometry with Adaptive Schmidt-Kalman Filter and Data Exploitation," IEEE RA-L (Robotics and Automation Letters), vol.11, no.1, pp.922-929, Jan. 2026. [Link]
- SaWa-ML: Structure-Aware Pose Correction and Weight Adaptation-Based Robust Multi-Robot Localization," in Proc. IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems (IROS 2025), Hangzhou, China, Oct. 2025. [Link]
- Seungwon Song, Hyungtae Lim, Alex Lee, Hyun Myung†, “DynaVINS++: Robust Visual-Inertial State Estimator in Dynamic Environments by Adaptive Truncated Least Squares and Stable State Recovery," IEEE RA-L (Robotics and Automation Letters), vol.9, no.10, pp.9127-9134, Oct. 2024. [Link]
- Hyungtae Lim, Beomsoo Kim, Daebeom Kim, Eungchang Mason Lee, and Hyun Myung†, “Quatro++: Robust Global Registration Exploiting Ground Segmentation for Loop Closing in LiDAR SLAM," International Journal of Robotics Research, vol.43, no.5, pp.685-715, Apr. 2024. [Link]
- Hyungtae Lim, Lucas Nunes, Benedikt Mersch, Xieyuanli Chen, Jens Behley, Hyun Myung†, and Cyrill Stachniss, “ERASOR2: Instance-Aware Robust 3D Mapping of the Static World in Dynamic Scenes," in Proc. Robotics: Science and Systems (RSS 2023), Daegu, Korea, Jul. 2023. [Link]
- Hyungtae Lim, Daebeom Kim, Beomsoo Kim, and Hyun Myung†, “AdaLIO: Robust Adaptive LiDAR-Inertial Odometry in Degenerate Indoor Environments," in Proc. The 20th International Conference on Ubiquitous Robots (UR 2023), Honolulu, USA, Jun. 2023. [Link]
- Seungwon Song, Hyungtae Lim, Alex Junho Lee, and Hyun Myung†, “DynaVINS: A Visual-Inertial SLAM for Dynamic Environments," IEEE RA-L (Robotics and Automation Letters), vol.7, no.4, pp.11523-11530, Oct. 2022. [Link]
- Seungjae Lee, Hyungtae Lim, and Hyun Myung†, “Patchwork++: Fast and Robust Ground Segmentation Solving Partial Under-Segmentation Using 3D Point Cloud," in Proc. 2022 IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems (IROS), pp. 13276-13283, Kyoto, Japan, Oct. 2022. [Link]
- Minho Oh, Euigon Jung, Hyunhtae Lim, Wonho Song, Sumin Hu, EungChang Lee, JungHee Park, Jaekyung Kim, Jangwoo Lee, and Hyun Myung†, “TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans," IEEE RA-L (Robotics and Automation Letters), vol.7, no.3, pp.7255-7262, Jul. 2022. (RA-L Best Paper Award) [Link]
- Hyunjun Lim, Jinwoo Jeon, and Hyun Myung†, “UV-SLAM: Unconstrained Line-based SLAM Using Vanishing Points for Structural Mapping," IEEE RA-L (Robotics and Automation Letters), vol.7, no.2, pp.1518 – 1525, Apr. 2022. [Link]
- Hyungtae Lim, Minho Oh, and Hyun Myung†, “Patchwork: Concentric Zone-based Region-wise Ground Segmentation with Ground Likelihood Estimation Using a 3D LiDAR Sensor," in Proc. IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems (IROS), pp. 6458-6465, Praque, Czech Republic, Sep. 2021. [Link]
- KwangYik Jung, YeEun Kim, HyunJun Lim, and Hyun Myung†, “ALVIO: Adaptive Line and Point Feature-based Visual Inertial Odometry for Robust Localization in Indoor Environments," in Proc. The 8th International Conference on Robot Intelligence Technology and Applications (RiTA), Cardiff, UK (virtual), Aug. 2021. (Robot Intelligence Technology and Applications: Results from the 8th International Conference on Robot Intelligence Technology and Applications. Lecture Notes in Mechanical Engineering book series (LNME), pp.171-184, Springer) [Link]
- Hyungtae Lim, Sungwon Hwang, and Hyun Myung†, “ERASOR: Egocentric Ratio of Pseudo Occupancy-based Dynamic Object Removal for Static 3D Point Cloud Map Building," IEEE RA-L (Robotics and Automation Letters), vol.6, no.2, pp.2272-2279, Apr. 2021. [Link]
- Sungwook Jung, Duckyu Choi, Seungwon Song, and Hyun Myung†, “Bridge Inspection Using Unmanned Aerial Vehicle Based on HG-SLAM: Hierarchical Graph-based SLAM," Remote Sensing, vol. 2, no.18, pp.3022, Sep. 2020. [Link]
- Seungwon Song, Hyungtae Lim, Sungwook Jung, and Hyun Myung†, “G2P-SLAM: Generalized RGB-D SLAM Framework for Mobile Robots in Low-Dynamic Environments," IEEE Access, vol.10, pp.21370 – 21383, Feb. 2022. [Link]
- Hyungjin Kim, Seungwon Song, and Hyun Myung†, “GP-ICP: Ground Plane ICP for Mobile Robots," IEEE Access, vol.7 no.1, pp.76599-76610, Jun. 2019. [Link]
Photos and Videos
Basic Concept
- Donghwa Lee, Hyun Myung, “Solution to the SLAM Problem in Low Dynamic Environments Using a Pose Graph and an RGB-D Sensor," Sensors, vol.14, no.7, pp.12467-12496, [Link], July 2014.
- Pose Graph-Based RGB-D SLAM in Low Dynamic Environments (Experiment #1)
- Pose Graph-Based RGB-D SLAM in Low Dynamic Environments (Experiment #2)
Magnetic field-based SLAM
- DV-SLAM (Dual sensor-based Vector-field SLAM)
- Underground localization
- Underground navigation
- Magnetic sequence-based SLAM
- Underground SLAM using magnetic field
- Self-localization at GPS outages
Related papers
- Jongdae Jung, Taekjun Oh, and Hyun Myung†, “Magnetic field constraints and sequence-based matching for indoor pose graph SLAM," Robotics and Autonomous Systems (RAS), vol.70, pp.92-105, Aug. 2015. [Link]
- Seung-Mok Lee, Jongdae Jung, Hyun Myung†, “DV-SLAM (Dual-sensor-based Vector-field SLAM) and Observability Analysis," IEEE Transactions on Industrial Electronics, vol. 62, no. 2, pp. 1101-1112, Feb. 2015. [Link]
- Byeolteo Park, Hyun Myung†, “Underground localization using dual magnetic field sequence measurement and pose graph SLAM for directional drilling," Measurement Science and Technology, vol. 25, no. 12, 125101 (12pp), Oct. 2014. [Link]
Photos and Videos
Seung-Mok Lee, Jongdae Jung, Shin Kim, In-Joo Kim, and Hyun Myung, “DV-SLAM (Dual-sensor-based Vector-field SLAM) and Observability Analysis," IEEE Trans. Industrial Electronics, vol.62, no.2, pp.1101-1112, [DOI], Feb. 2015.

Seamless Localization at Indoor/Outdoor for U-Eco City
- Localization for Users and Robot
- Building ratio map localization (UAVs)
- NLOS-robust UWB-inertial odometry
- Ground plane ICP
Related papers
- Jieum Hyun and Hyun Myung†, “NR-UIO: NLOS-Robust UWB-Inertial Odometry based on IMM and NLOS Factor Estimation," Sensors, vol.21, no.23, pp. 7886 – 7902 , Nov. 2021. [Link]
- Junho Choi and Hyun Myung†, “BRM Localization: UAV Localization in GNSS-Denied EnvironmentsBased on Matching of Numerical Map and UAV Images," in Proc. IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems (IROS), Las Vegas, USA (virtual), Oct. 2020. [Link]
- Hyungjin Kim, Seungwon Song, and Hyun Myung†, “GP-ICP: Ground Plane ICP for Mobile Robots," IEEE Access, vol.7 no.1, pp.76599-76610, Jun. 2019. [Link]
- Jongdae Jung and Hyun Myung†, “Indoor Localization Using Particle Filter and Map-based NLOS Ranging Model," in Proc. ICRA (IEEE Int’l Conference on Robotics and Automation), Shanghai, China, May 2011. [Link]
Photos and Videos
Basic Concept
Localization for Users and Robot
- Jongdae Jung and Hyun Myung, “Indoor Localization Using Particle Filter and Map-based NLOS Ranging Model,” in Proc. of ICRA (IEEE Int’l Conference on Robotics and Automation), pp.5185-5190, Shanghai, China, May 2011.
Seamless Localization for U-Eco City
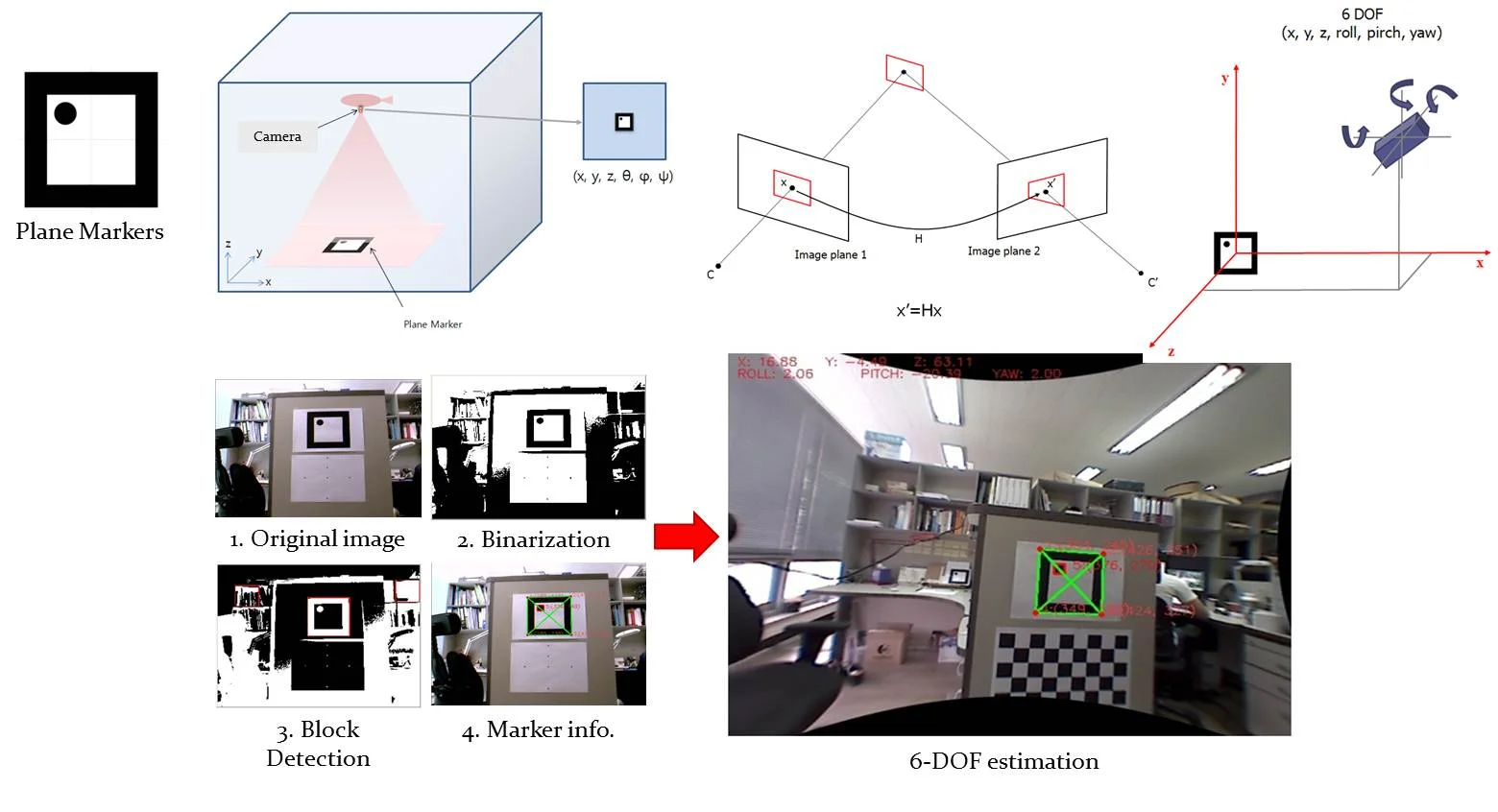
Robotic Fish (Fibo) for Aquarium
- Vision-based Localization
Photos and Videos
Vision-based Localization
Related papers
- No related paper
JEROS (Jellyfish Elimination RObotic Swarm)
- Formation control of JEROS
Photos and Videos
System Concept
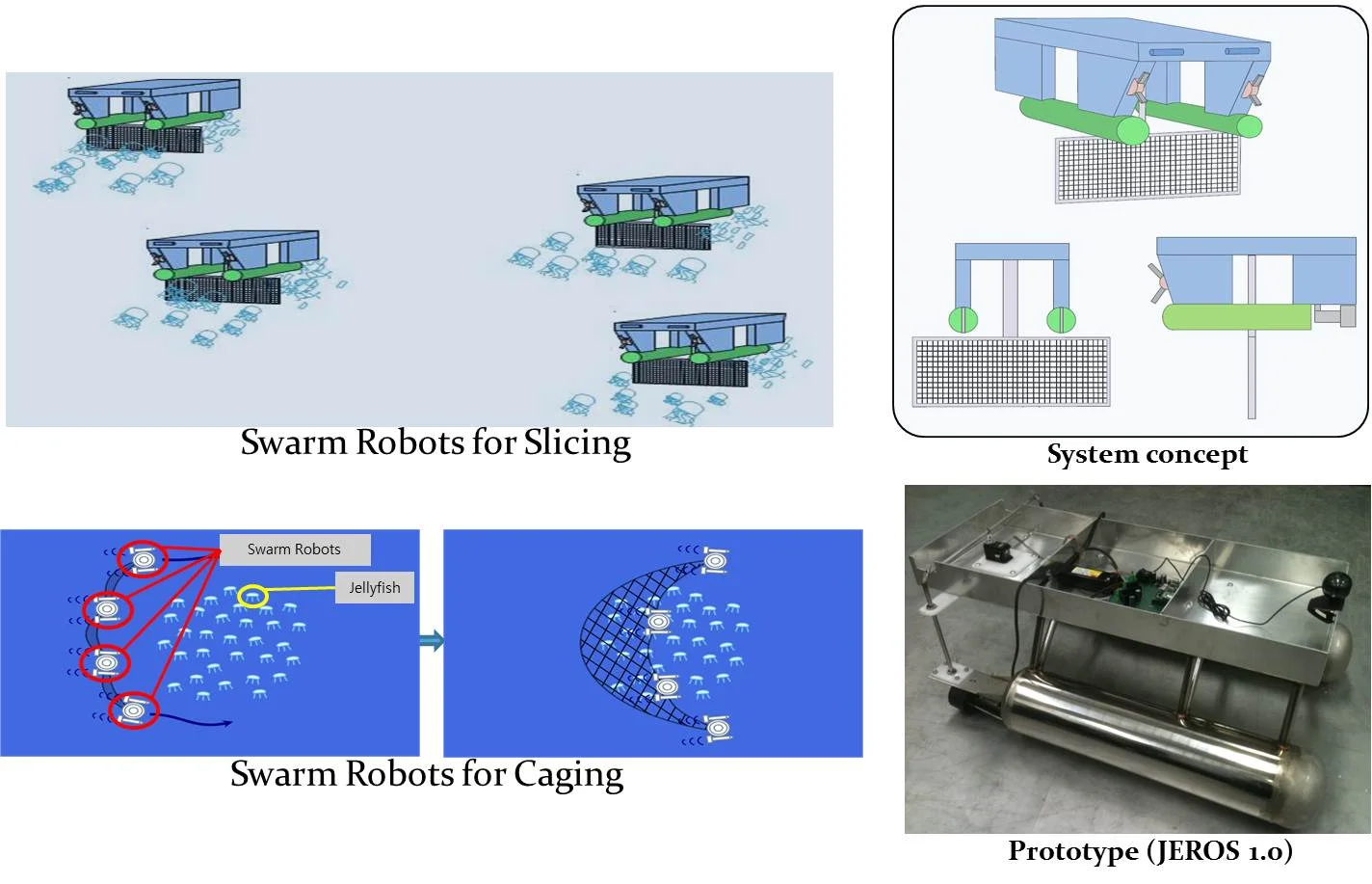
Experiment

JEROS prototype (version 2)

Formation control of JEROS

Related papers
- No related paper
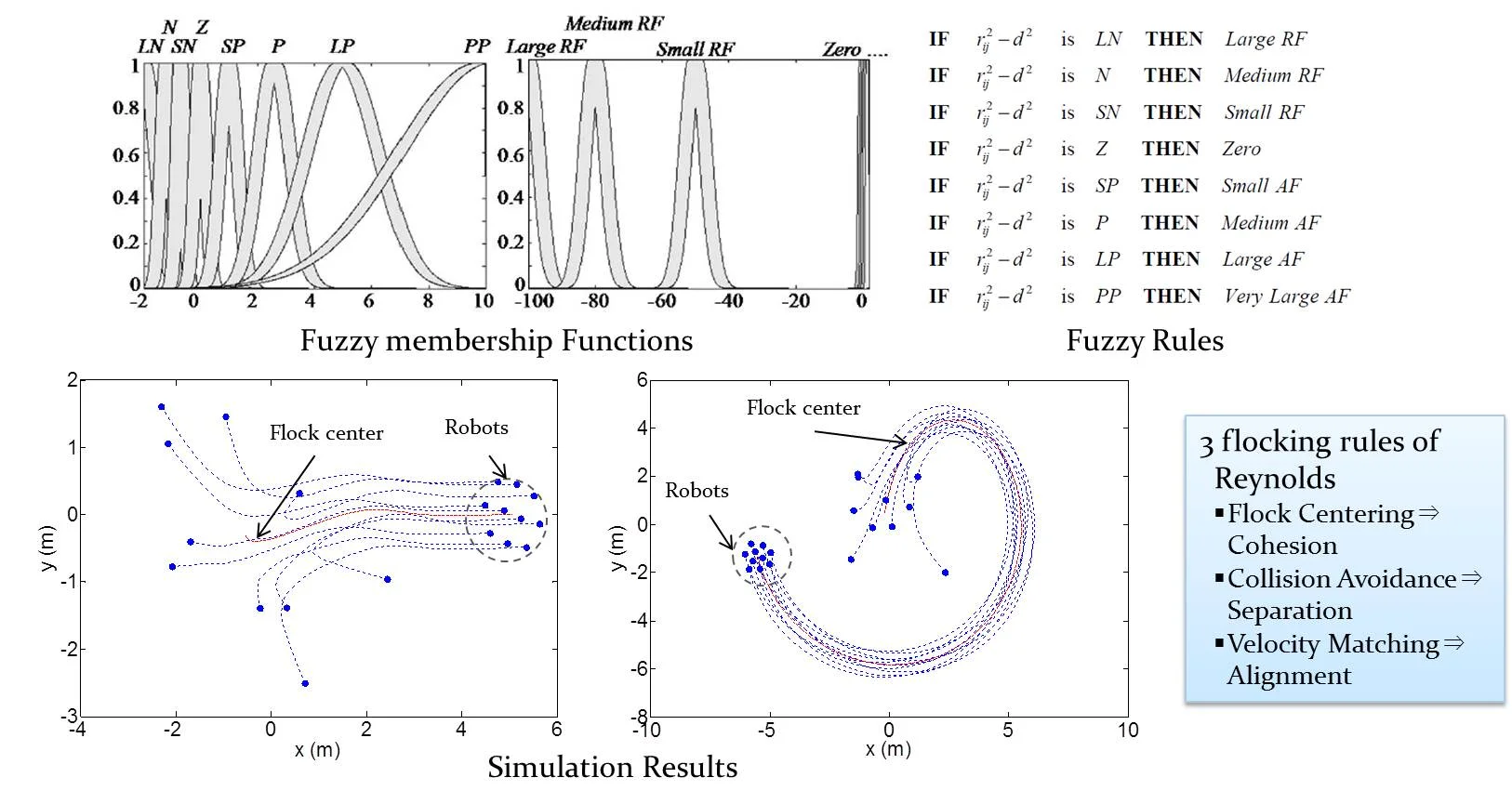
Formation Control for Swarm Robots
- Using Fuzzy Logic (Type-2) for Decentralized Formation Control
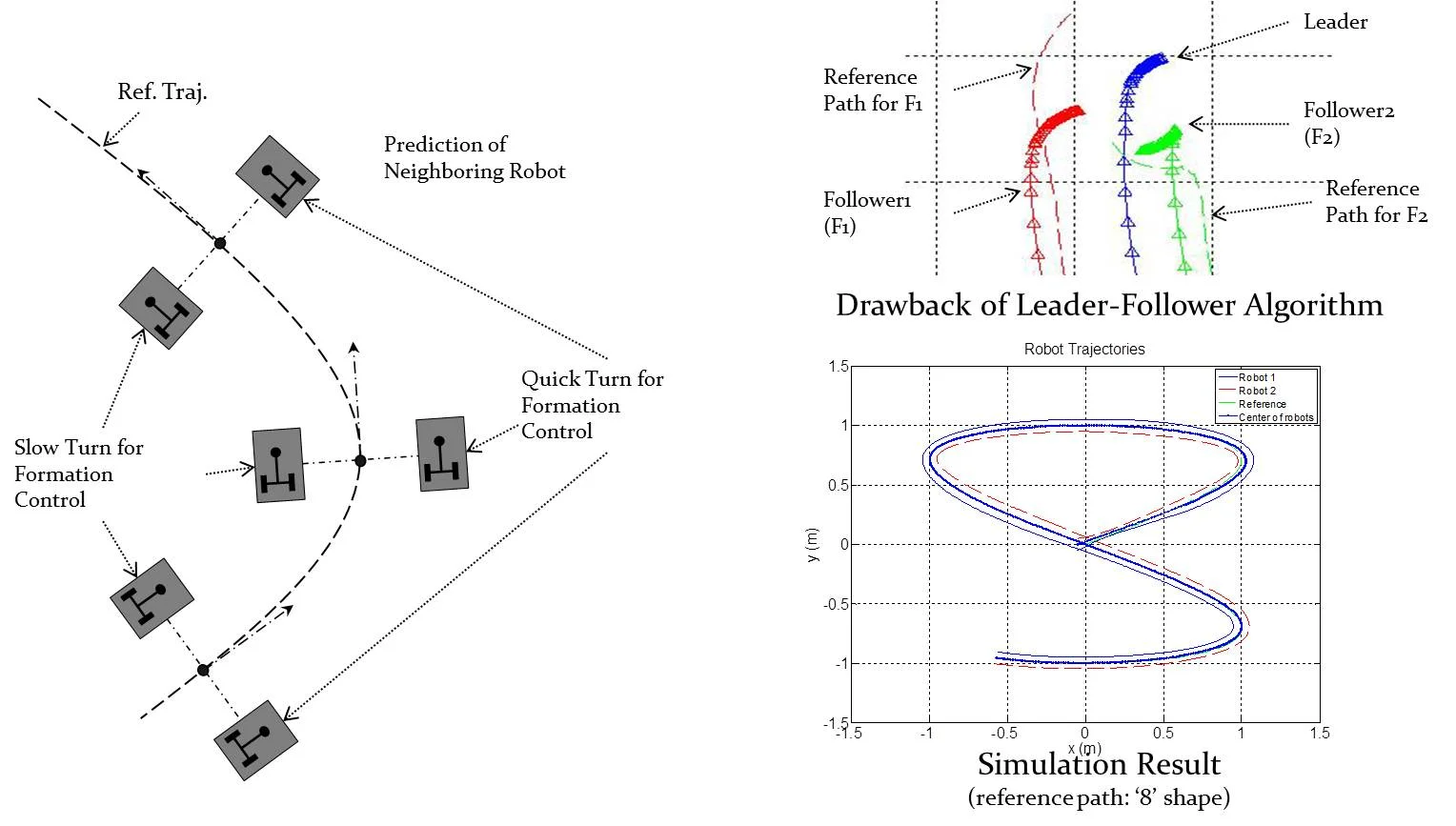
- Predictive Control Scheme for Swarm Robots.
Photos and Videos
Using Fuzzy Logic (Type-2) for Decentralized Formation Control
Predictive Control Scheme for Swarm Robots
Related papers
- No related paper
Bird-like Biped Robot for Rough Terrain
Photos and Videos
System Concept Design
Related papers
- No related paper