


DreamWaQ media coverage (Mar. 30, 2023) / 드림워크 언론보도
작성자
URL admin
작성일
2023-03-30 20:10
조회
3686
Prof. Myung's research team develops 'DreamWaQer' technology that walks up stairs without seeing.
- Developed 'DreamWaQ', a walking robot control technology based on artificial intelligence deep reinforcement learning that can walk in atypical environments without visual and tactile information.
- Mass production of various types of quadrupedal 'DreamWaQer' robots using 'DreamWaQ' technology
- Expected to be utilized for exploration missions in atypical environments caused by disasters such as fires
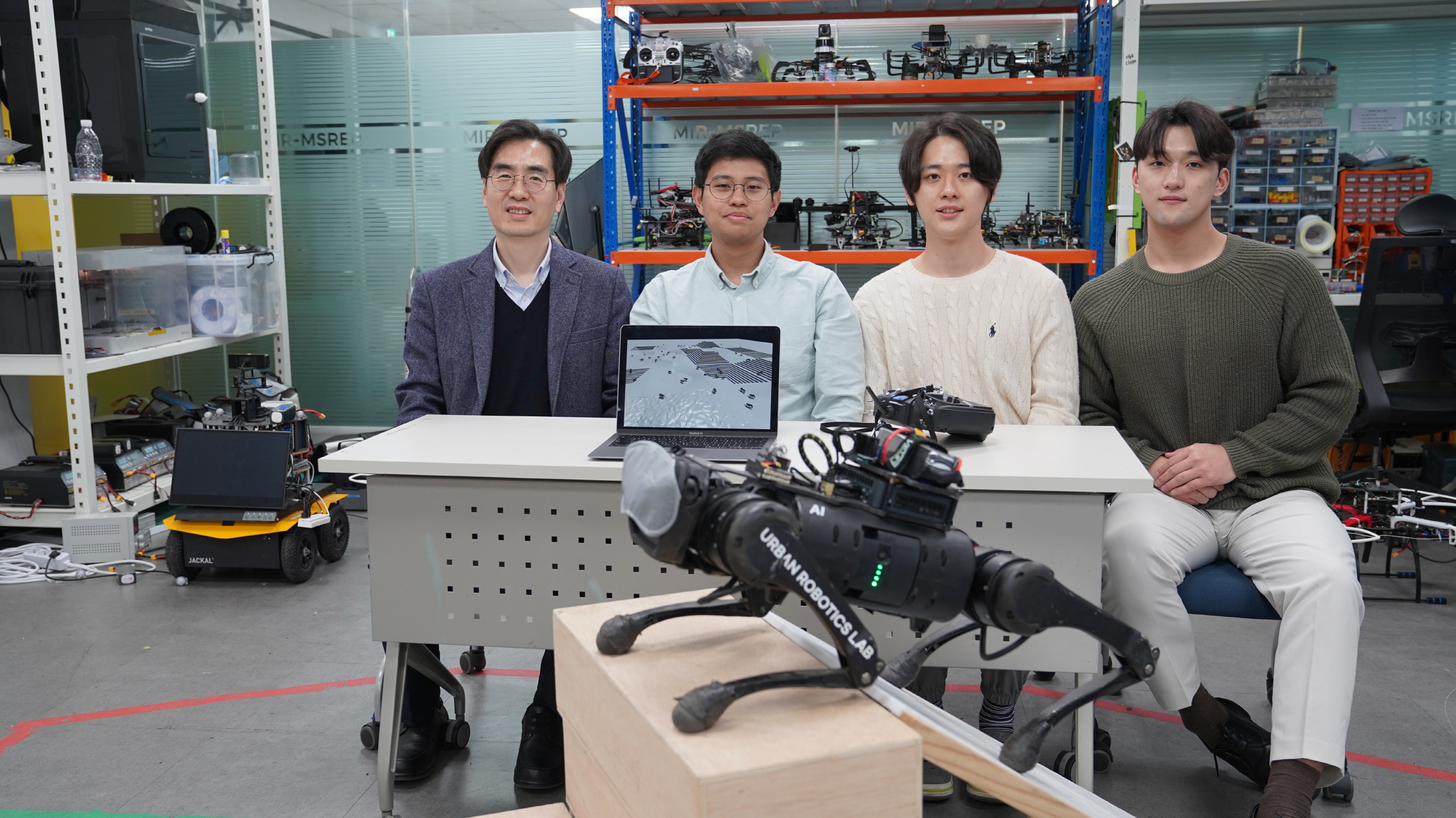
(From left) Prof. Hyun Myung, Doctoral Candidate I Made Aswin Nahrendra, Doctoral Candidate Byungho Yoo, and Doctoral Candidate Minho Oh. In the foreground, DreamWaQer, a quadrupedal robot equipped with DreamWaQ technology.
(왼쪽부터: 명현 교수, 이 마데 아스윈 나렌드라 박사과정, 유병호 박사과정, 오민호 박사과정)
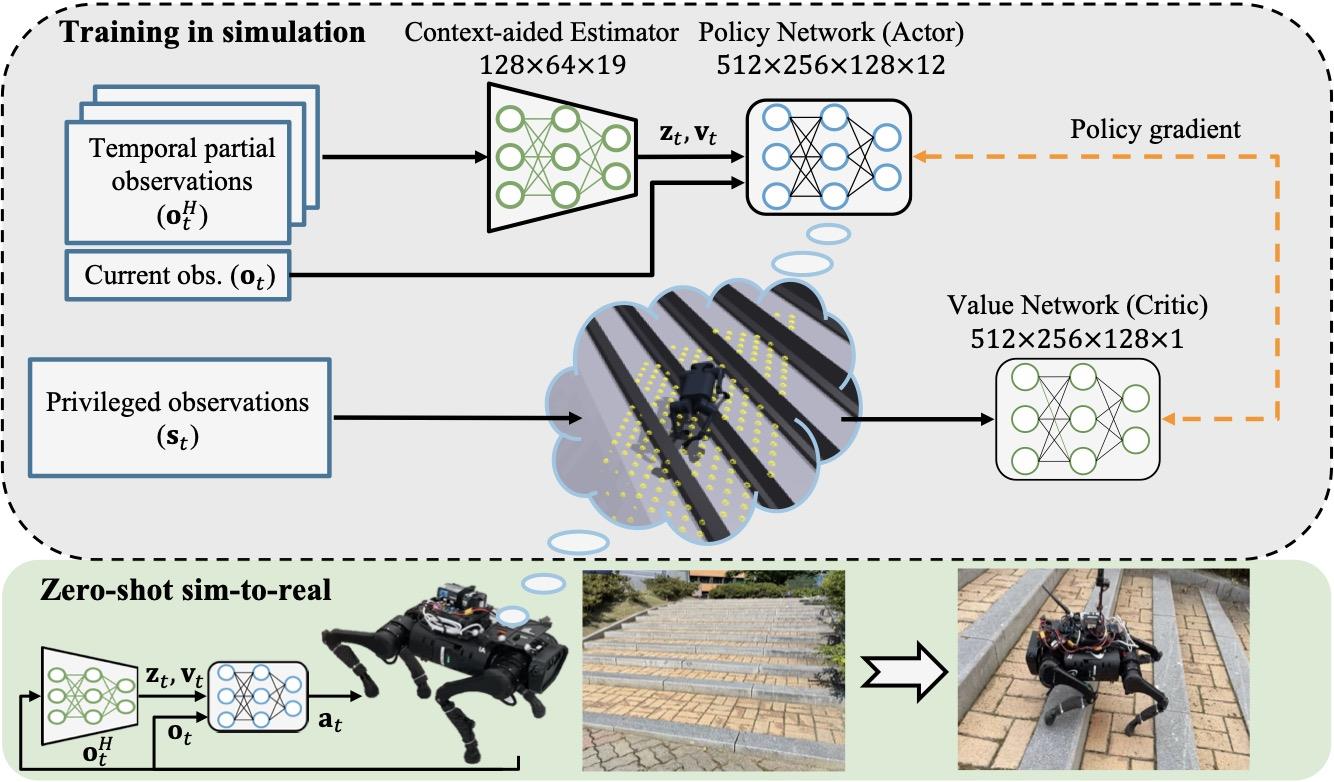
A quadrupedal robot technology that can go up and down stairs and move without falling in uneven environments such as tree roots without the help of visual or tactile sensors in smoky disaster situations has been developed by domestic researchers. A research team led by Professor Myung, Hyun of the Department of Electrical and Electronic Engineering, Urban Robotics Laboratory, has developed a walking robot control technology that enables robust 'blind locomotion' in various unstructured environments. The team has developed a technology called "DreamWaQ," which is named for its ability to walk blindly, just as a person can wake up from sleep and walk to the bathroom in the dark with little visual assistance, and the robot equipped with this technology is called a "DreamWaQer." This technology can be used to create various types of quadrupedal robot DreamWalkers. In addition to the laboratory environment, the DreamWaQer robot has demonstrated robust performance in a university campus environment with curbs and speed bumps, and in a field environment with tree roots and gravel, by overcoming steps of up to two-thirds of its height from the ground to its body when walking. The team also found that the robot can walk stably at speeds as slow as 0.3 m/s and as fast as 1.0 m/s, regardless of the environment. The results of the study, which was led by Doctoral Candidate I Made Aswin Nahrendra and co-authored by Doctoral Candidate Byung Ho Yoo, have been accepted and will be presented at the IEEE International Conference on Robotics and Automation (ICRA), the world's most prestigious conference on robotics, in London, UK, at the end of May. (Paper title: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning) Videos of DreamWalker, a walking robot equipped with the developed DreamWaQ, can be viewed at the following addresses.
Main video: https://youtu.be/JC1_bnTxPiQ
Cookie video: https://youtu.be/mhUUZVbeDA0
명현 교수 연구팀, 안보고도 계단을 성큼성큼 걷는 '드림워커' 기술 개발
- 시각 및 촉각 정보 없이 비정형 환경 보행이 가능한 인공지능 심층 강화학습 기반 보행 로봇 제어기술 ‘드림워크’ 개발
- ‘드림워크’ 기술을 활용하여 다양한 형태의 사족보행 ‘드림워커’ 로봇 양산 가능
- 화재와 같은 재난으로 인한 비정형 환경 탐사 임무 수행 등에 활용 기대
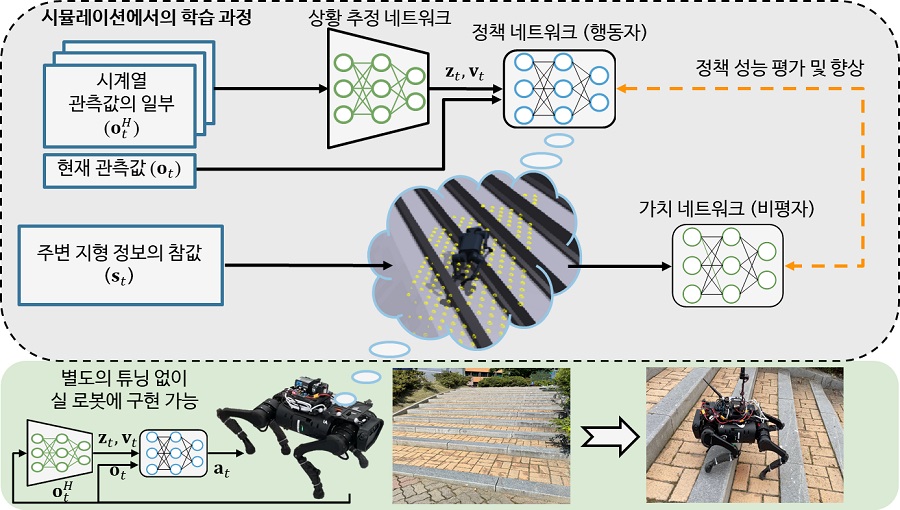
연기가 자욱해 앞이 안보이는 재난 상황에서 별도의 시각이나 촉각 센서의 도움 없이 계단을 오르내리고 나무뿌리와 같은 울퉁불퉁한 환경 등에서 넘어지지 않고 움직이는 사족보행 로봇 기술이 국내 연구진에 의해 개발됐다. 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 다양한 비정형 환경에서도 강인한 `블라인드 보행(blind locomotion)'을 가능케 하는 보행 로봇 제어 기술을 개발했다. 연구팀은 사람이 수면 중 깨어서 깜깜한 상태에서 화장실을 갈 때 시각적인 도움이 거의 없이 보행이 가능한 것처럼, 블라인드 보행이 가능하다고 해서 붙여진 ‘드림워크(DreamWaQ)’기술을 개발하였고 이 기술이 적용된 로봇을 ‘드림워커(DreamWaQer)’라고 명명했다. 즉 이 기술을 탑재하면 다양한 형태의 사족보행 로봇 드림워커를 만들어낼 수 있게 되는 것이다. 드림워커(DreamWaQer) 로봇은 실험실 환경뿐 아니라, 연석과 과속방지턱이 많은 대학 캠퍼스 환경, 나무뿌리와 자갈이 많은 야지 환경 등에서 보행 시 지면으로부터 몸체까지 높이의 3분의 2 (2/3) 정도의 계단 등을 극복함으로써 강인한 성능을 입증했다. 또한 환경과 무관하게, 0.3m/s의 느린 속도부터 1.0m/s의 다소 빠른 속도까지도 안정적인 보행이 가능함을 연구팀은 확인했다. 이번 연구 결과는 이 마데 아스윈 나렌드라(I Made Aswin Nahrendra) 박사과정이 제1 저자로, 유병호 박사과정이 공동 저자로 참여했으며, 오는 5월 말 영국 런던에서 개최되는 로보틱스 분야의 세계 최고 권위 학회인 ICRA(IEEE International Conference on Robotics and Automation)에 채택되어 발표될 예정이다. (논문명: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning) 개발된 드림워크를 탑재한 보행 로봇 드림워커의 구동 및 보행 영상은 아래 주소에서 확인할 수 있다.
한편, 이번 연구는 산업통상자원부 로봇산업핵심기술개발 사업의 지원을 받아 수행되었다. (과제명: 동적, 비정형 환경에서의 보행 로봇의 자율이동을 위한 이동지능 SW 개발 및 실현장 적용)
메인 영상: https://youtu.be/JC1_bnTxPiQ
쿠키 영상: https://youtu.be/mhUUZVbeDA0
KBS | “안 보여도 성큼성큼”…사족보행 로봇 ‘신기술’ 개발
YTN | 보지 않고도 뛰는 로봇!... 카메라·라이다·센서 없어도 지형 판단
MBN | 연기 속 계단도 '성큼성큼'…학습하는 재난 로봇 국내서 개발
대전MBC | '안 보고' 지형변화 감지 로봇
TJB대전방송 | "눈 없어도 돼, 안보고 달린다", 사족로봇 끝판왕 개발
카이스트 | 드림워커, 안 보고도 계단을 성큼성큼 걷다
전자신문 | KAIST 보행로봇, 앞이 안보여도 계단 오르고 걷는다 - 전자신문 (etnews.com)
전자신문 | KAIST '드림워커', 눈 감고 험지도 거뜬하게
헤럴드경제 | "보이지 않는데도 높은 계단 척척...카이스트, 新로봇제어 기술 개발"- 헤럴드경제 (heraldcorp.com)
헤럴드경제 | “벌레인 줄 알았다” 계단 쏜살같이 오르는 ‘이놈’ 알고보니…눈 없는
이데일리 | 연기 자욱한 재난 현장에서도 계단 오르내릴 수 있는 로봇 개발
디지틀조선일보 | KAIST, 어둠 속도 자유롭게 걷는 ‘네발로봇’ 개발
아시아경제 | "내가 사족보행 끝판왕"…시각없이 인공지능으로 걷는다
동아사이언스 | 카메라·라이다 없이 모든 지형 다니는 사족보행 로봇
연합뉴스 | KAIST 명현 교수팀, 사족보행 로봇기술 개발
연합뉴스 | 시각·촉각센서 없이 계단 등 오르는 사족보행 로봇기술 개발
부산일보 | KAIST, 시각·촉각센서 없이 계단 등 오르는 사족보행 로봇기술 개발
뉴스1 | KAIST, 넘어지지 않고 움직이는 ‘사족보행 로봇 기술’ 개발
뉴스1 | '자다깨서 눈감고 화장실 가는 것처럼'…앞 못봐도 계단 걷는 로봇
ZDNet Korea | KAIST, 주변 보지 않고도 씩씩하게 잘 걷는 사족보행 로봇 개발
서울경제 | KAIST ‘드림워커’, 보지 않고도 계단 성큼성큼 걷다
로봇신문 | KAIST '드림워커', 안보고도 계단을 성큼성큼 걷다
헬로디디 | 깜깜한 어둠 속···방지턱·계단·야지 OK '보행기술' 나왔다
파이낸셜뉴스 | 로봇이 보지 않고도 계단과 산을 돌아다닌다
디지털타임스 | 앞이 안 보여도, 계단 있어도 잘 걷는 `사족보행 로봇` 나왔다
KAIST | KAIST debuts “DreamWaQer” - a quadrupedal robot that can walk in the dark
Mirage News | KAIST Unveils DreamWaQer Quadrupedal Robot for Dark Environments
TechXplore | DreamWaQer: A quadrupedal robot that can walk in the dark
Pressreels | Korean Researchers Develop Blind Locomotion Robot Control Technology
- Developed 'DreamWaQ', a walking robot control technology based on artificial intelligence deep reinforcement learning that can walk in atypical environments without visual and tactile information.
- Mass production of various types of quadrupedal 'DreamWaQer' robots using 'DreamWaQ' technology
- Expected to be utilized for exploration missions in atypical environments caused by disasters such as fires
(From left) Prof. Hyun Myung, Doctoral Candidate I Made Aswin Nahrendra, Doctoral Candidate Byungho Yoo, and Doctoral Candidate Minho Oh. In the foreground, DreamWaQer, a quadrupedal robot equipped with DreamWaQ technology.
(왼쪽부터: 명현 교수, 이 마데 아스윈 나렌드라 박사과정, 유병호 박사과정, 오민호 박사과정)
A quadrupedal robot technology that can go up and down stairs and move without falling in uneven environments such as tree roots without the help of visual or tactile sensors in smoky disaster situations has been developed by domestic researchers. A research team led by Professor Myung, Hyun of the Department of Electrical and Electronic Engineering, Urban Robotics Laboratory, has developed a walking robot control technology that enables robust 'blind locomotion' in various unstructured environments. The team has developed a technology called "DreamWaQ," which is named for its ability to walk blindly, just as a person can wake up from sleep and walk to the bathroom in the dark with little visual assistance, and the robot equipped with this technology is called a "DreamWaQer." This technology can be used to create various types of quadrupedal robot DreamWalkers. In addition to the laboratory environment, the DreamWaQer robot has demonstrated robust performance in a university campus environment with curbs and speed bumps, and in a field environment with tree roots and gravel, by overcoming steps of up to two-thirds of its height from the ground to its body when walking. The team also found that the robot can walk stably at speeds as slow as 0.3 m/s and as fast as 1.0 m/s, regardless of the environment. The results of the study, which was led by Doctoral Candidate I Made Aswin Nahrendra and co-authored by Doctoral Candidate Byung Ho Yoo, have been accepted and will be presented at the IEEE International Conference on Robotics and Automation (ICRA), the world's most prestigious conference on robotics, in London, UK, at the end of May. (Paper title: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning) Videos of DreamWalker, a walking robot equipped with the developed DreamWaQ, can be viewed at the following addresses.
Main video: https://youtu.be/JC1_bnTxPiQ
Cookie video: https://youtu.be/mhUUZVbeDA0
명현 교수 연구팀, 안보고도 계단을 성큼성큼 걷는 '드림워커' 기술 개발
- 시각 및 촉각 정보 없이 비정형 환경 보행이 가능한 인공지능 심층 강화학습 기반 보행 로봇 제어기술 ‘드림워크’ 개발
- ‘드림워크’ 기술을 활용하여 다양한 형태의 사족보행 ‘드림워커’ 로봇 양산 가능
- 화재와 같은 재난으로 인한 비정형 환경 탐사 임무 수행 등에 활용 기대
연기가 자욱해 앞이 안보이는 재난 상황에서 별도의 시각이나 촉각 센서의 도움 없이 계단을 오르내리고 나무뿌리와 같은 울퉁불퉁한 환경 등에서 넘어지지 않고 움직이는 사족보행 로봇 기술이 국내 연구진에 의해 개발됐다. 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 다양한 비정형 환경에서도 강인한 `블라인드 보행(blind locomotion)'을 가능케 하는 보행 로봇 제어 기술을 개발했다. 연구팀은 사람이 수면 중 깨어서 깜깜한 상태에서 화장실을 갈 때 시각적인 도움이 거의 없이 보행이 가능한 것처럼, 블라인드 보행이 가능하다고 해서 붙여진 ‘드림워크(DreamWaQ)’기술을 개발하였고 이 기술이 적용된 로봇을 ‘드림워커(DreamWaQer)’라고 명명했다. 즉 이 기술을 탑재하면 다양한 형태의 사족보행 로봇 드림워커를 만들어낼 수 있게 되는 것이다. 드림워커(DreamWaQer) 로봇은 실험실 환경뿐 아니라, 연석과 과속방지턱이 많은 대학 캠퍼스 환경, 나무뿌리와 자갈이 많은 야지 환경 등에서 보행 시 지면으로부터 몸체까지 높이의 3분의 2 (2/3) 정도의 계단 등을 극복함으로써 강인한 성능을 입증했다. 또한 환경과 무관하게, 0.3m/s의 느린 속도부터 1.0m/s의 다소 빠른 속도까지도 안정적인 보행이 가능함을 연구팀은 확인했다. 이번 연구 결과는 이 마데 아스윈 나렌드라(I Made Aswin Nahrendra) 박사과정이 제1 저자로, 유병호 박사과정이 공동 저자로 참여했으며, 오는 5월 말 영국 런던에서 개최되는 로보틱스 분야의 세계 최고 권위 학회인 ICRA(IEEE International Conference on Robotics and Automation)에 채택되어 발표될 예정이다. (논문명: DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning) 개발된 드림워크를 탑재한 보행 로봇 드림워커의 구동 및 보행 영상은 아래 주소에서 확인할 수 있다.
한편, 이번 연구는 산업통상자원부 로봇산업핵심기술개발 사업의 지원을 받아 수행되었다. (과제명: 동적, 비정형 환경에서의 보행 로봇의 자율이동을 위한 이동지능 SW 개발 및 실현장 적용)
메인 영상: https://youtu.be/JC1_bnTxPiQ
쿠키 영상: https://youtu.be/mhUUZVbeDA0
KBS | “안 보여도 성큼성큼”…사족보행 로봇 ‘신기술’ 개발
YTN | 보지 않고도 뛰는 로봇!... 카메라·라이다·센서 없어도 지형 판단
MBN | 연기 속 계단도 '성큼성큼'…학습하는 재난 로봇 국내서 개발
대전MBC | '안 보고' 지형변화 감지 로봇
TJB대전방송 | "눈 없어도 돼, 안보고 달린다", 사족로봇 끝판왕 개발
카이스트 | 드림워커, 안 보고도 계단을 성큼성큼 걷다
전자신문 | KAIST 보행로봇, 앞이 안보여도 계단 오르고 걷는다 - 전자신문 (etnews.com)
전자신문 | KAIST '드림워커', 눈 감고 험지도 거뜬하게
헤럴드경제 | "보이지 않는데도 높은 계단 척척...카이스트, 新로봇제어 기술 개발"- 헤럴드경제 (heraldcorp.com)
헤럴드경제 | “벌레인 줄 알았다” 계단 쏜살같이 오르는 ‘이놈’ 알고보니…눈 없는
이데일리 | 연기 자욱한 재난 현장에서도 계단 오르내릴 수 있는 로봇 개발
디지틀조선일보 | KAIST, 어둠 속도 자유롭게 걷는 ‘네발로봇’ 개발
아시아경제 | "내가 사족보행 끝판왕"…시각없이 인공지능으로 걷는다
동아사이언스 | 카메라·라이다 없이 모든 지형 다니는 사족보행 로봇
연합뉴스 | KAIST 명현 교수팀, 사족보행 로봇기술 개발
연합뉴스 | 시각·촉각센서 없이 계단 등 오르는 사족보행 로봇기술 개발
부산일보 | KAIST, 시각·촉각센서 없이 계단 등 오르는 사족보행 로봇기술 개발
뉴스1 | KAIST, 넘어지지 않고 움직이는 ‘사족보행 로봇 기술’ 개발
뉴스1 | '자다깨서 눈감고 화장실 가는 것처럼'…앞 못봐도 계단 걷는 로봇
ZDNet Korea | KAIST, 주변 보지 않고도 씩씩하게 잘 걷는 사족보행 로봇 개발
서울경제 | KAIST ‘드림워커’, 보지 않고도 계단 성큼성큼 걷다
로봇신문 | KAIST '드림워커', 안보고도 계단을 성큼성큼 걷다
헬로디디 | 깜깜한 어둠 속···방지턱·계단·야지 OK '보행기술' 나왔다
파이낸셜뉴스 | 로봇이 보지 않고도 계단과 산을 돌아다닌다
디지털타임스 | 앞이 안 보여도, 계단 있어도 잘 걷는 `사족보행 로봇` 나왔다
KAIST | KAIST debuts “DreamWaQer” - a quadrupedal robot that can walk in the dark
Mirage News | KAIST Unveils DreamWaQer Quadrupedal Robot for Dark Environments
TechXplore | DreamWaQer: A quadrupedal robot that can walk in the dark
Pressreels | Korean Researchers Develop Blind Locomotion Robot Control Technology