자율 로봇의 항법 (위치 추정, 자율 주행/비행)
-
카메라 등 시각 센서, LiDAR, 자기장 센서, 비콘 등을 활용한 SLAM (Simultaneous Localization And Mapping, 동시적 위치 추정 및 지도 작성)
-
자율 주행 자동차를 위한 위치 추정 및 자율 주행 알고리즘
-
드론 등 무인 비행체(Unmanned Aerial Vehicle)의 위치 추정 및 자율 비행 알고리즘
-
GPS 사용이 불가능한 상황에서 동작하는 위치 추정 알고리즘
-
지하 환경에서 동작하는 위치 추정 및 자율 주행/비행 알고리즘
-
무인 수상정(Unmanned Surface Vehicle) 등 수상 이동체의 위치 추정 및 자율 주행 알고리즘
-
자율 무인 잠수정(Autonomous Underwater Vehicle), 로봇 물고기 등 수중 로봇의 위치 추정 및 자율 주행 알고리즘
3차원 위치 추정 및 지도 작성(SLAM)
3차원 SLAM (Simultaneous Localization And Mapping)
컨셉트
- Donghwa Lee, Hyun Myung, “Solution to the SLAM Problem in Low Dynamic Environments Using a Pose Graph and an RGB-D Sensor," Sensors, vol.14, no.7, pp.12467-12496, [Link], July 2014.
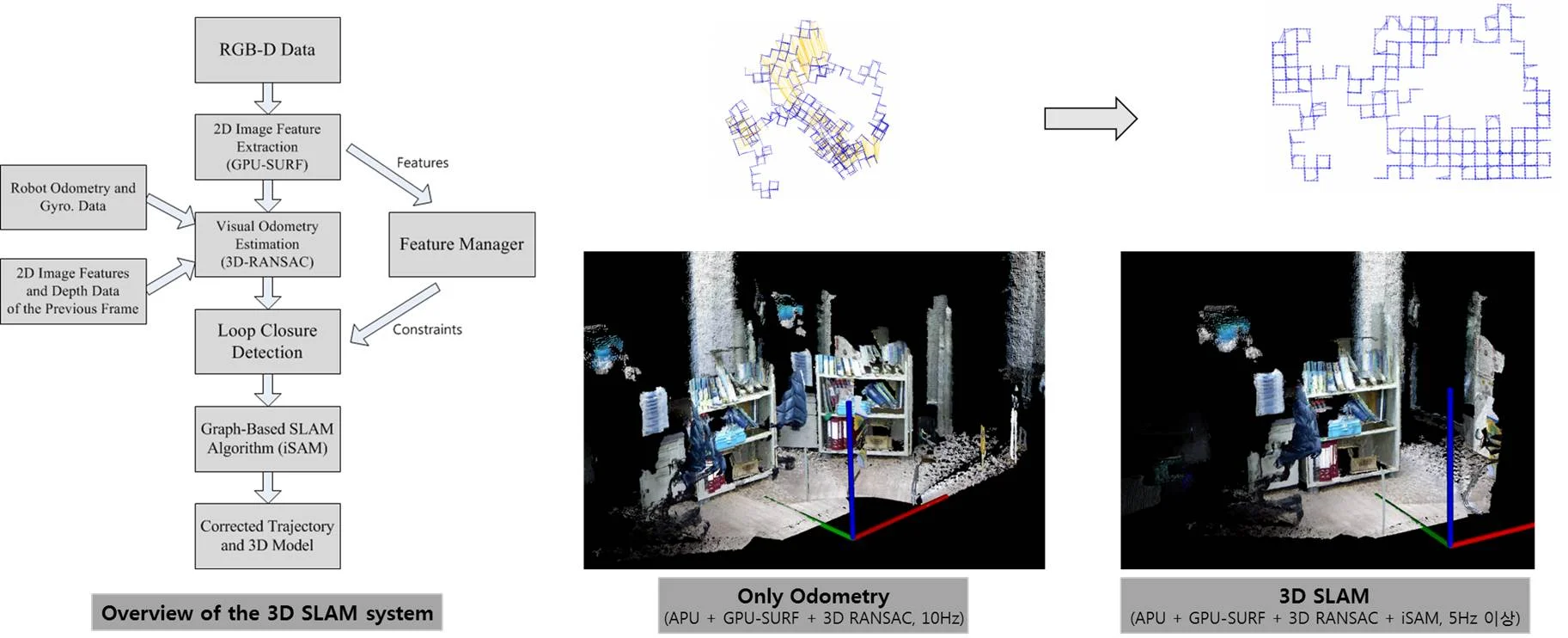
- 낮은 동적환경에서의 포즈 그래프 기반의 RGB-D 센서 SLAM (실험 #1)
- 낮은 동적환경에서의 포즈 그래프 기반의 RGB-D 센서 SLAM (실험 #2)
Kinect 네비게이션 대회 관련 연구 (IROS 2014)
- 낮은 동적환경을 위한 3차원 SLAM
- 물체 인식
- 최적 경로 생성 및 재생성
- 동적물체 회피
MAV(쿼드로터) 자율 비행 및 제어
- 경로 생성, 경로 추종, 장애물 회피
- 움직이는 차량위의 마커 기반 착륙
- 2016 DJI 개발자 경연대회 결선 진출 [Link]
자기장 기반 위치 인식 및 지도 작성(SLAM)
DV-SLAM (Dual sensor-based Vector-field SLAM)
Seung-Mok Lee, Jongdae Jung, Shin Kim, In-Joo Kim, and Hyun Myung, “DV-SLAM (Dual-sensor-based Vector-field SLAM) and Observability Analysis," IEEE Trans. Industrial Electronics, vol.62, no.2, pp.1101-1112, [DOI], Feb. 2015.

Underground localization
Byeolteo Park and Hyun Myung, “Underground localization using dual magnetic field sequence measurement and pose graph SLAM for directional drilling," Measurement Science and Technology, vol.25, no.12, 125101 (12pp), [DOI], Oct. 2014.

<

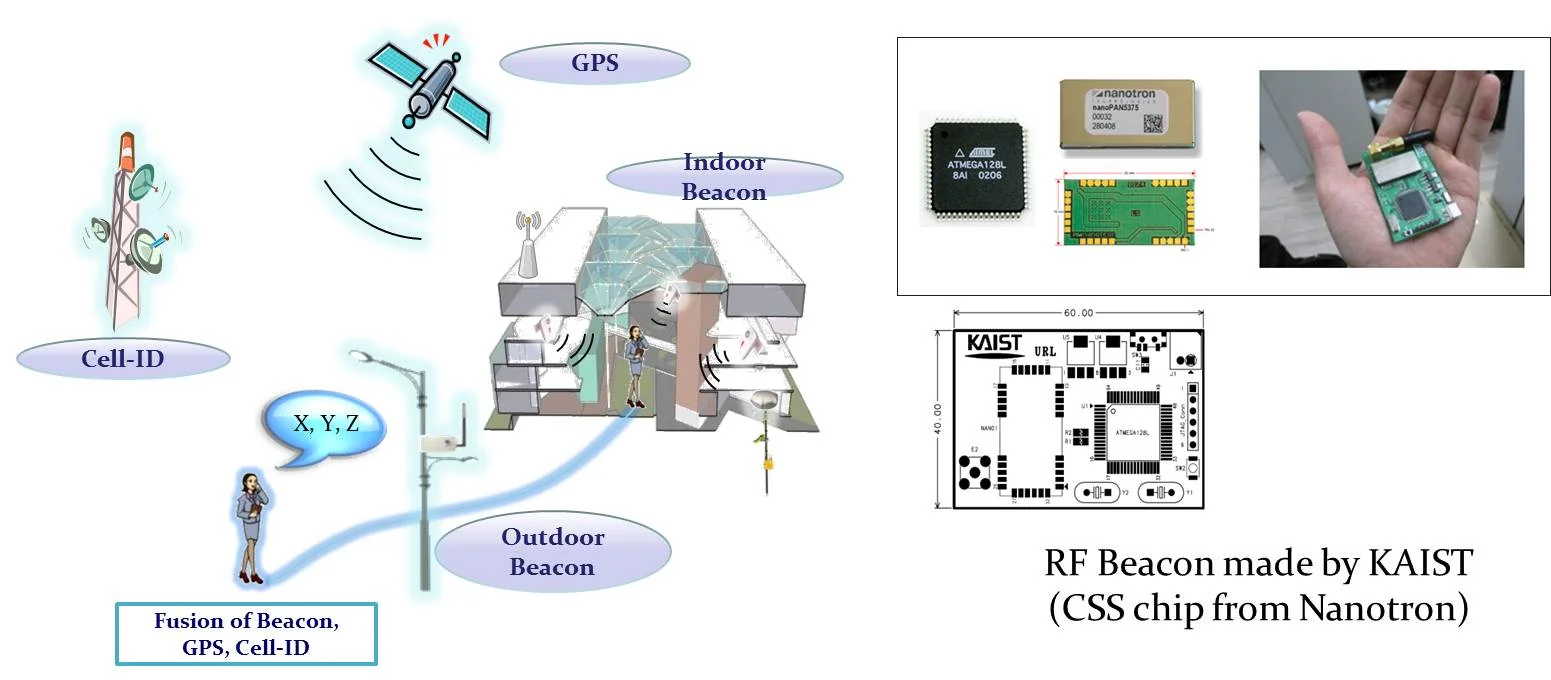
유비쿼터스 도시 구축을 위한 실내/외 원활한 위치추정
유비쿼터스 도시 구축을 위한 실내/외 원활한 위치추정
기본 개념
로봇과 여러 명의 사용자의 위치추정
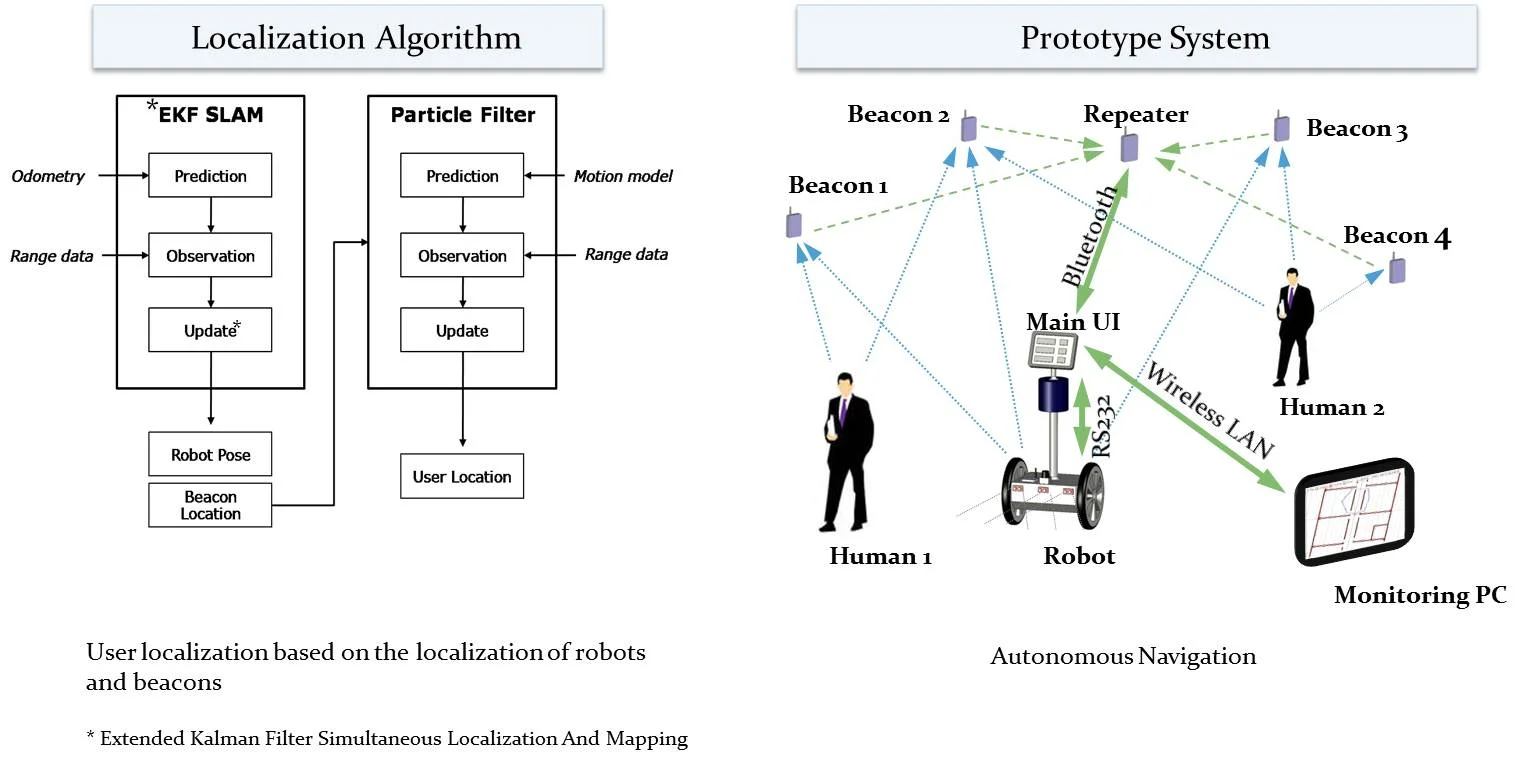
- Jongdae Jung and Hyun Myung, “Indoor Localization Using Particle Filter and Map-based NLOS Ranging Model,” in Proc. of ICRA (IEEE Int’l Conference on Robotics and Automation), pp.5185-5190, Shanghai, China, May 2011.
유비쿼터스 도시 구축을 위한 원활한 위치추정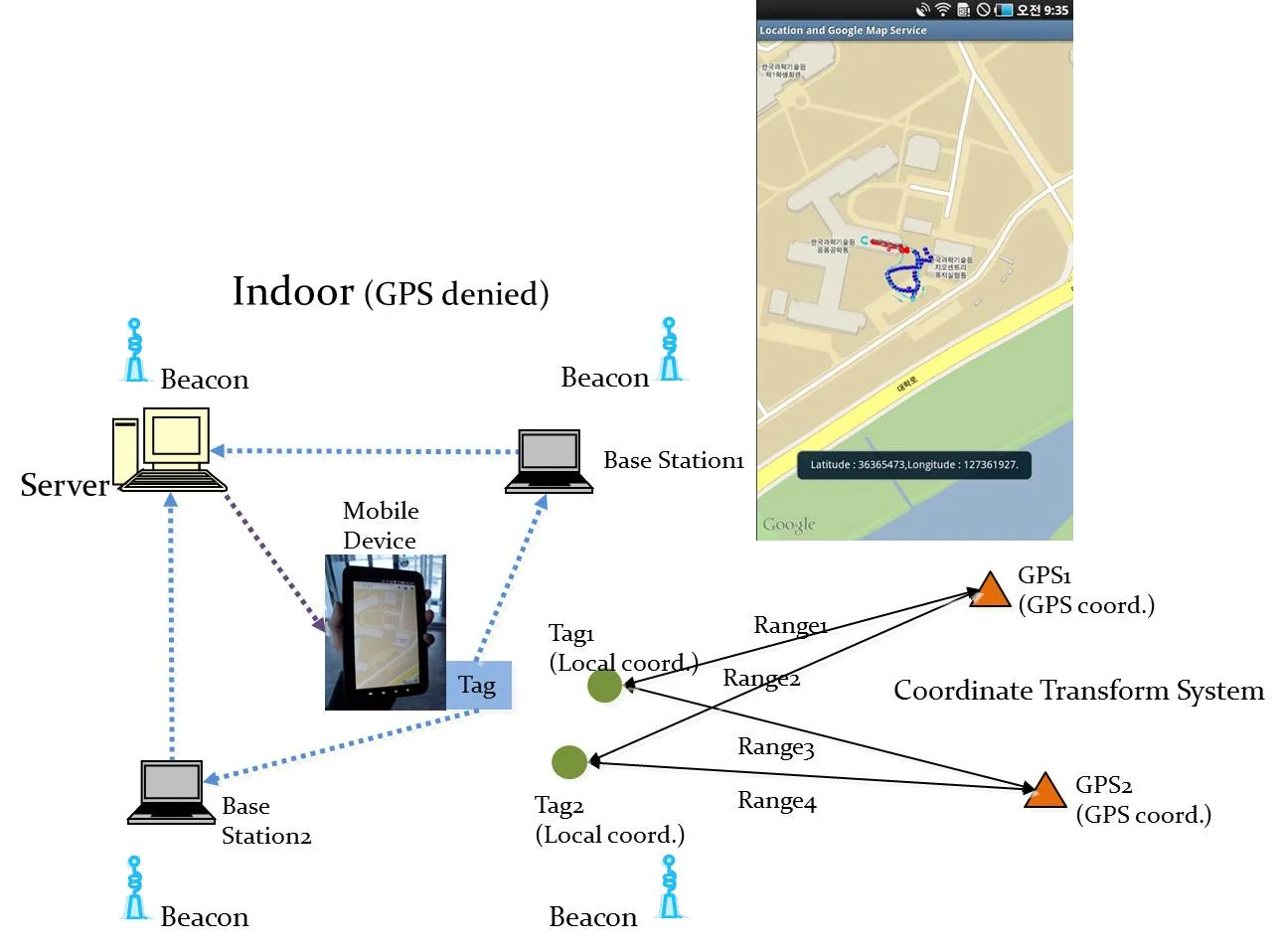
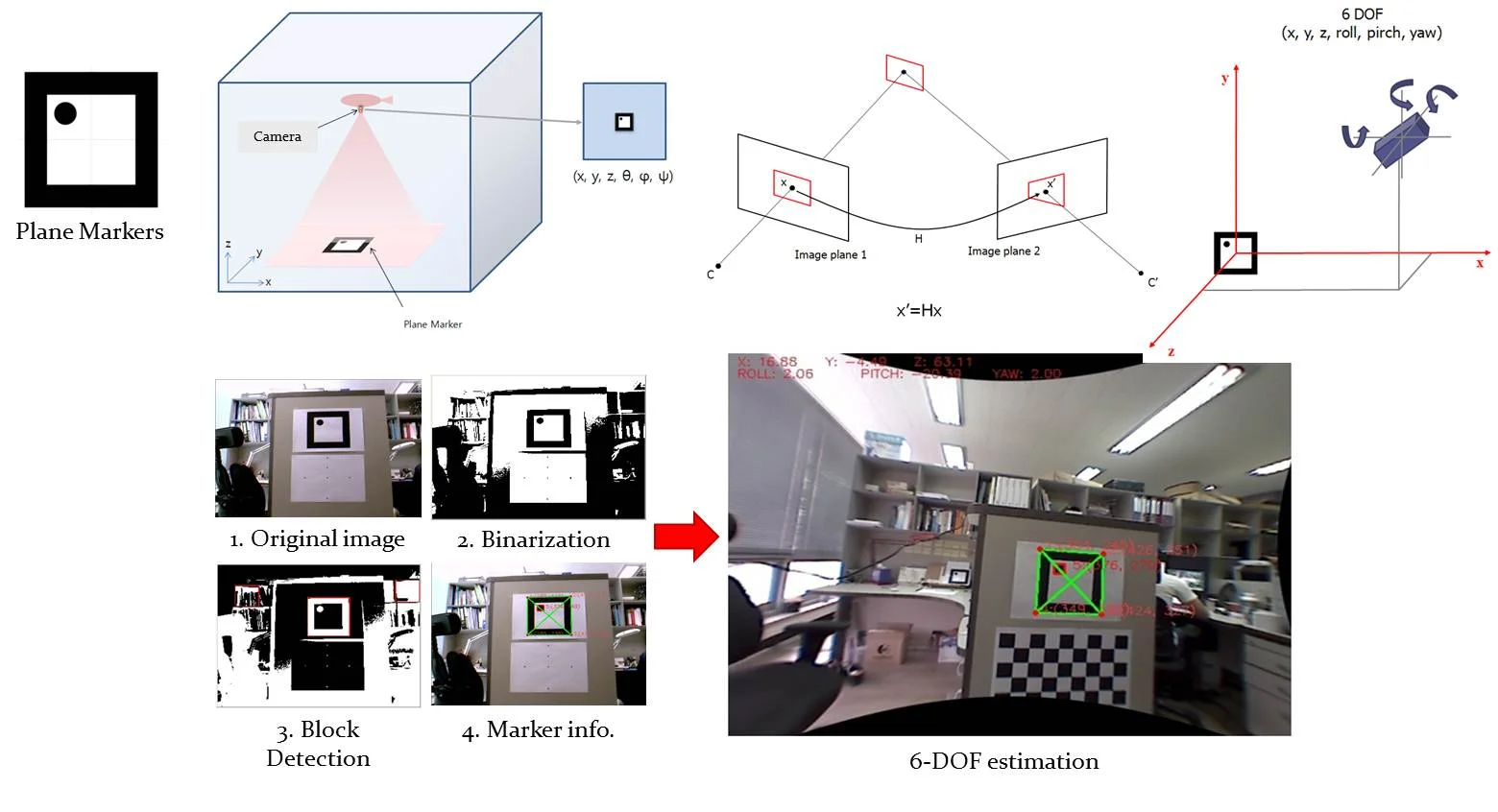
수족관에서 작동되는 로봇물고기 (Fibo)
Robotic Fish (Fibo) for Aquarium
시각 정보 기반의 위치 추정
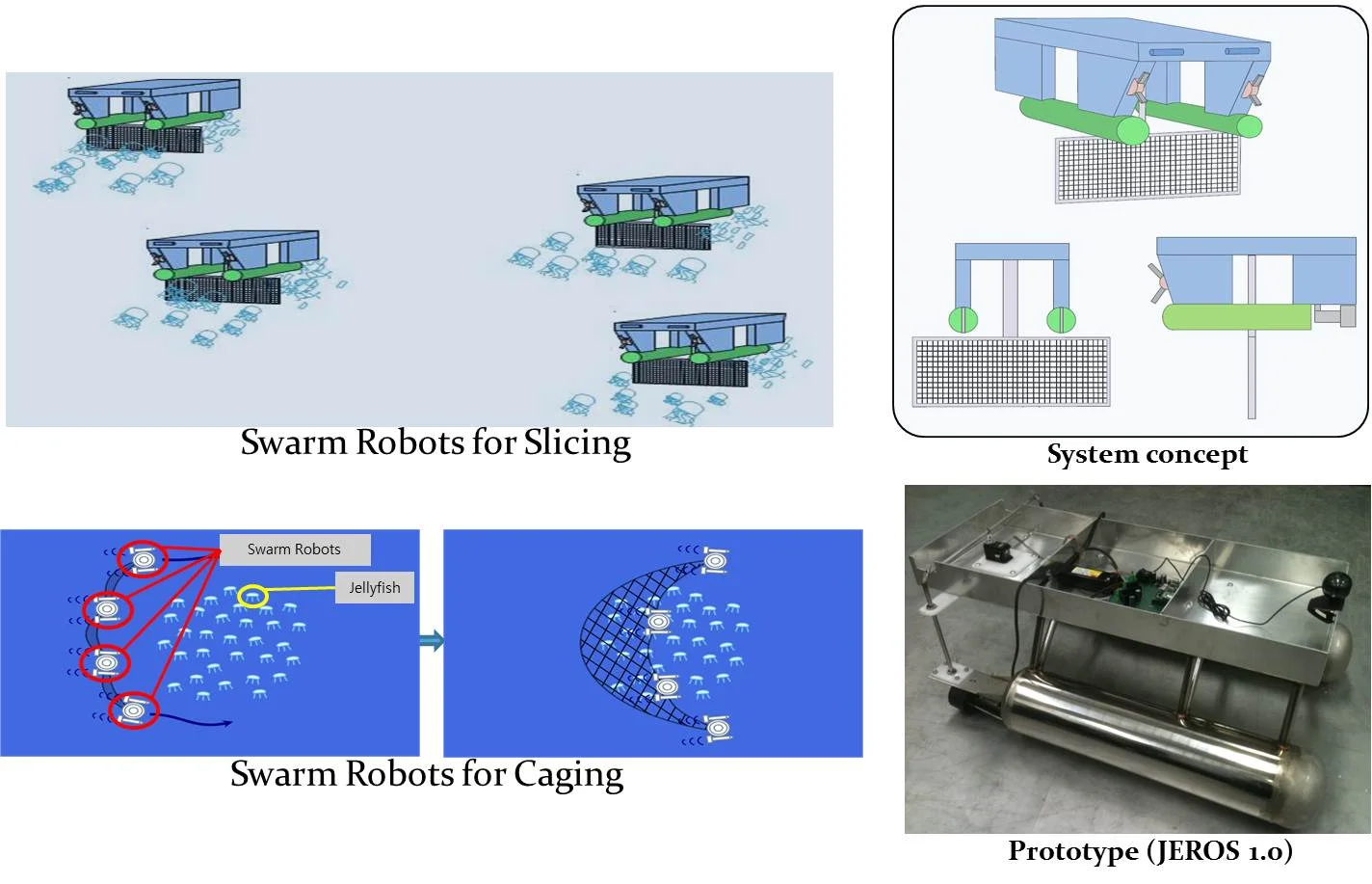
해파리 제거를 위한 군집 로봇 시스템 (JEROS)
해파리 제거를 위한 군집 로봇 시스템 (JEROS)
시스템 개략도
실험사진

JEROS 프로토타입 (ver. 2)

JEROS의 편대 제어

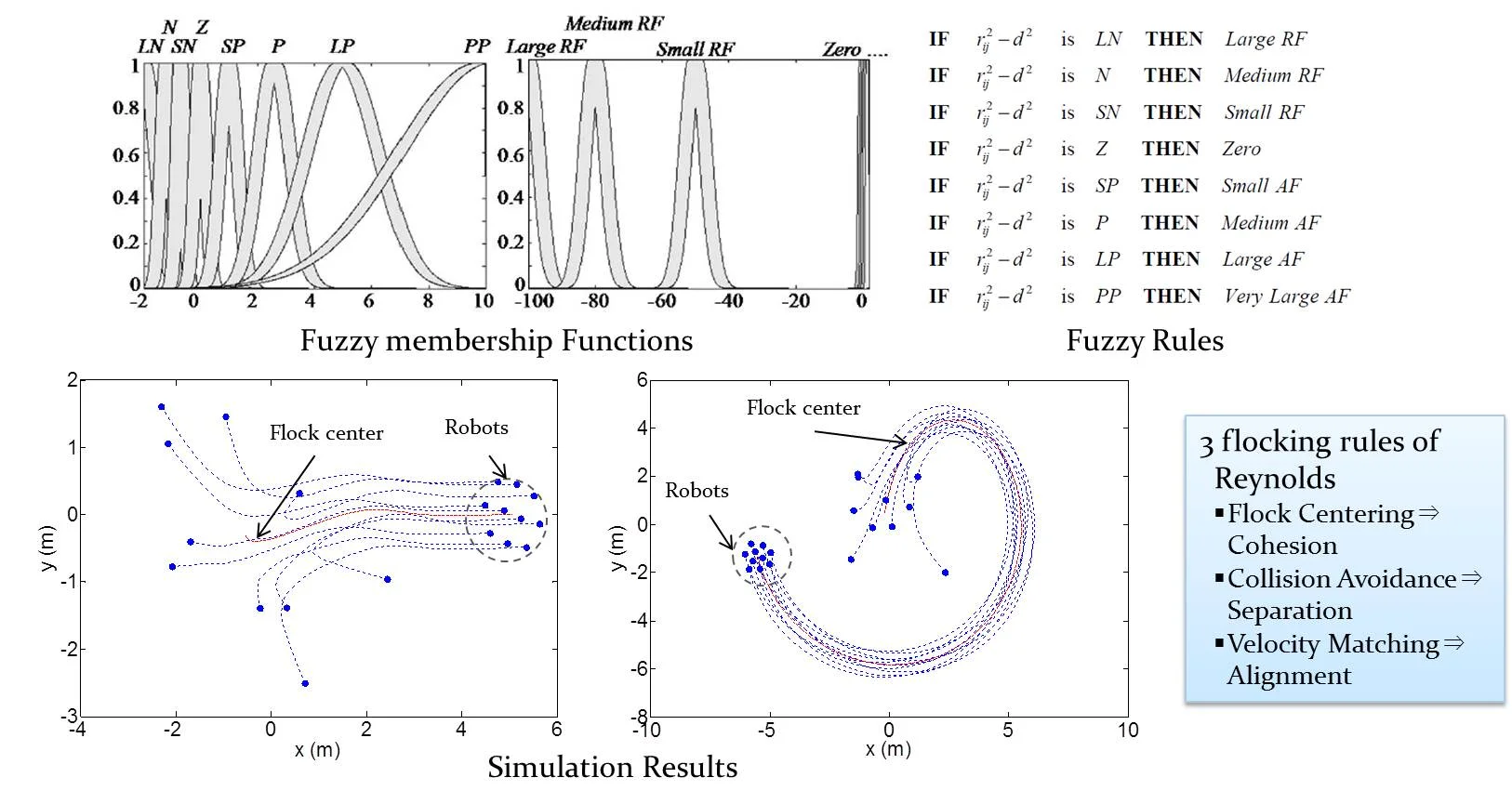
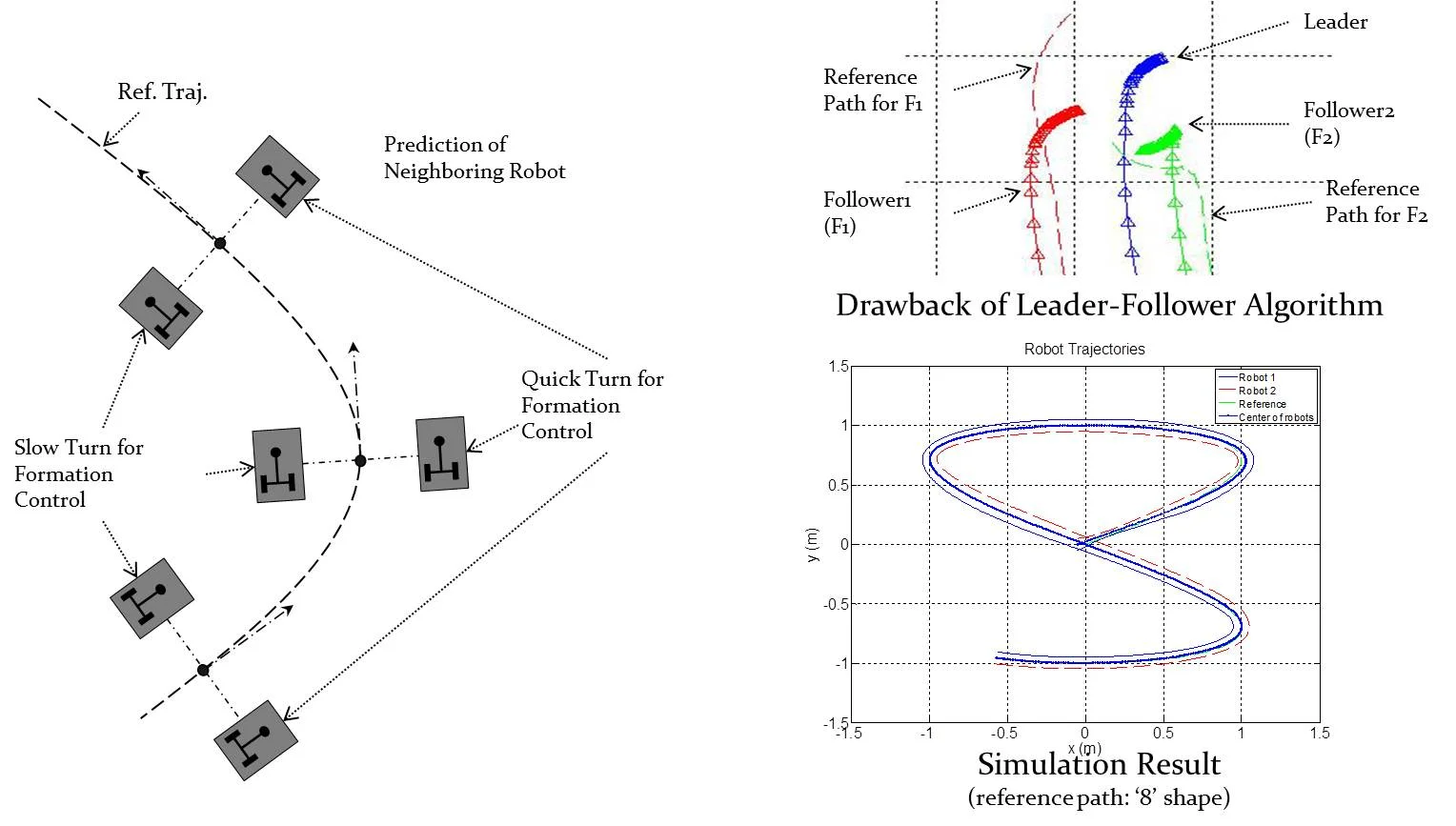
군집 로봇의 편대 제어
군집 로봇의 편대 제어
타입 2의 퍼지 논리를 활용한 분산 편대 제어