




← 연구 분야
미래 로봇 기술
초소형 비행체(MAV)를 활용한 수직 구조물 점검
- 환경 점검 및 감시를 위한 유비쿼터스 로봇 설계
CAROS (Climbing Aerial RObot System)

FAROS (Fire-proof Aerial RObot System)
관련 논문
- Hyungyu Lee, Myeongwoo Jeong, Chanyoung Kim, Hyungtae Lim, Changgue Park, Sungwon Hwang, and Hyun Myung†, “Low-level Pose Control of Tilting Multirotor for Wall Perching Tasks Using Renforcement Learning," in Proc. IEEE/RSJ Int'l Conf. on Intelligent Robots and Systems (IROS), pp. 9669-9676, Praque, Czech Republic, Sep. 2021.
- Hyungyu Lee , Byeongho Yu, Christian Tirtawardhana, Chanyoung Kim, Myeongwoo Jeong, Sumin Hu, and Hyun Myung†, “CAROS-Q: Climbing Aerial RObot System Adopting Rotor Offset With a Quasi-Decoupling Controller," IEEE RA-L (Robotics and Automation Letters), vol.6, no.4, pp.8490-8497, Oct. 2021. [Link]
- Wancheol Myeong, Kwangyik Jung, and Hyun Myung, “Development of FAROS (fire-proof drone) using an aramid fiber armor and air buffer layer," in Proc. of Int'l Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), pp. 204-207, Jeju, Korea, June 28-July 1, 2017.
- Wancheol Myeong, Seungwon Song, Kwangyik Jung, and Hyun Myung†, “Development of Soft Perching System using Tilting Mechanism for Wall-Climbing Drone," in Proc. IEEE/RSJ Int’l Conf. on Intelligent Robots and Systems (IROS), Vancouver, Canada, Sep. 2017.
- Sungwook Jung, Jae-Uk Shin, Wancheol Myeong, Hyun Myung†, “Mechanism and system design of MAV(Micro Aerial Vehicle)-type wall-climbing robot for inspection of wind blades and non-flat surfaces," in Proc. Int'l Conf. on Control, Automation and Systems (ICCAS), Busan, Korea, Oct. 2015.
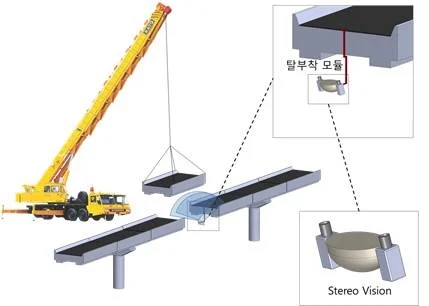

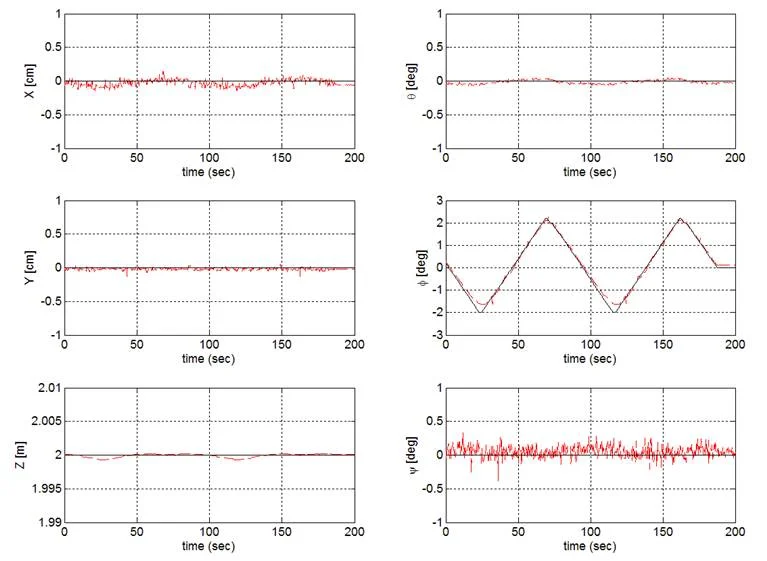
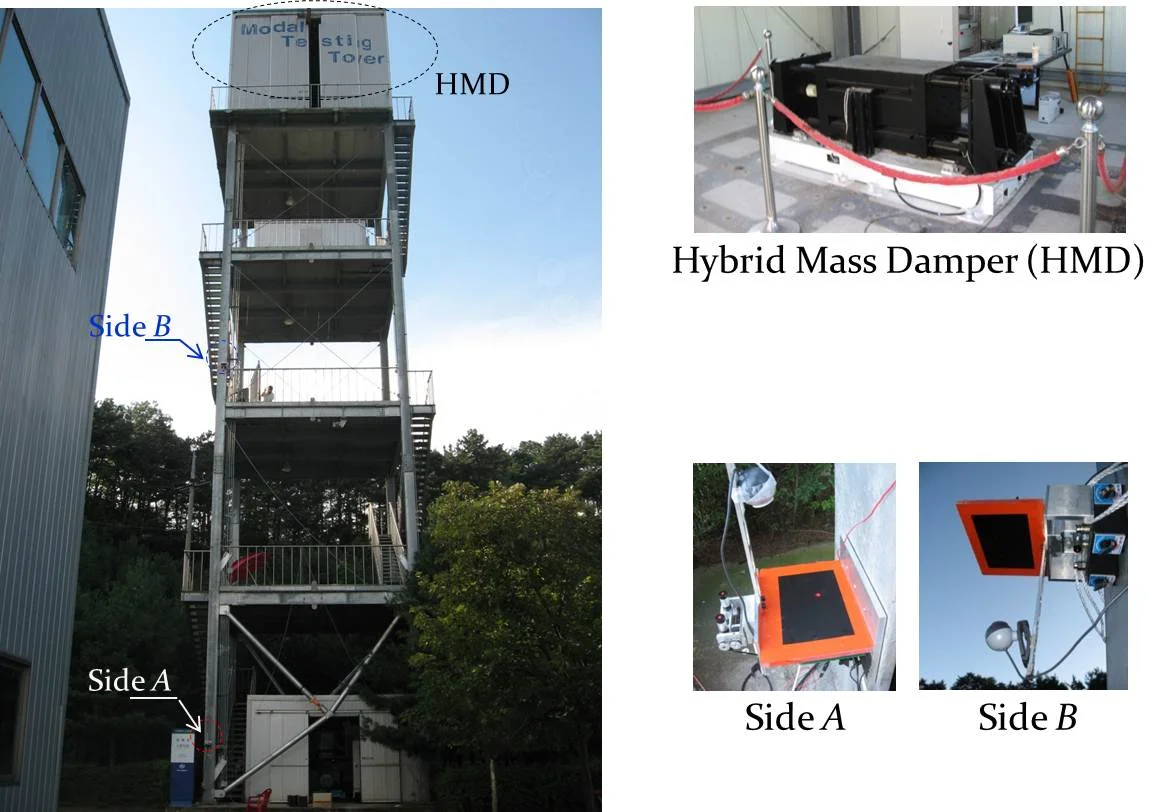
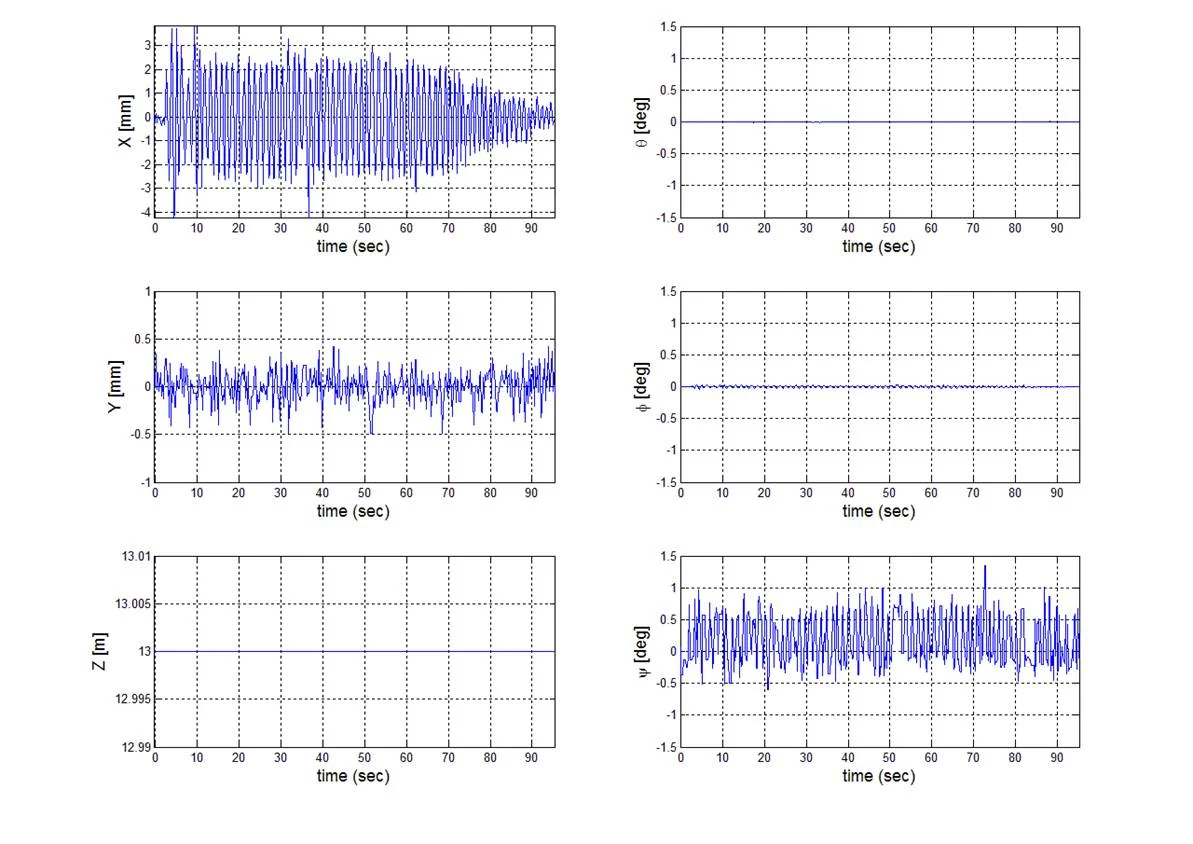
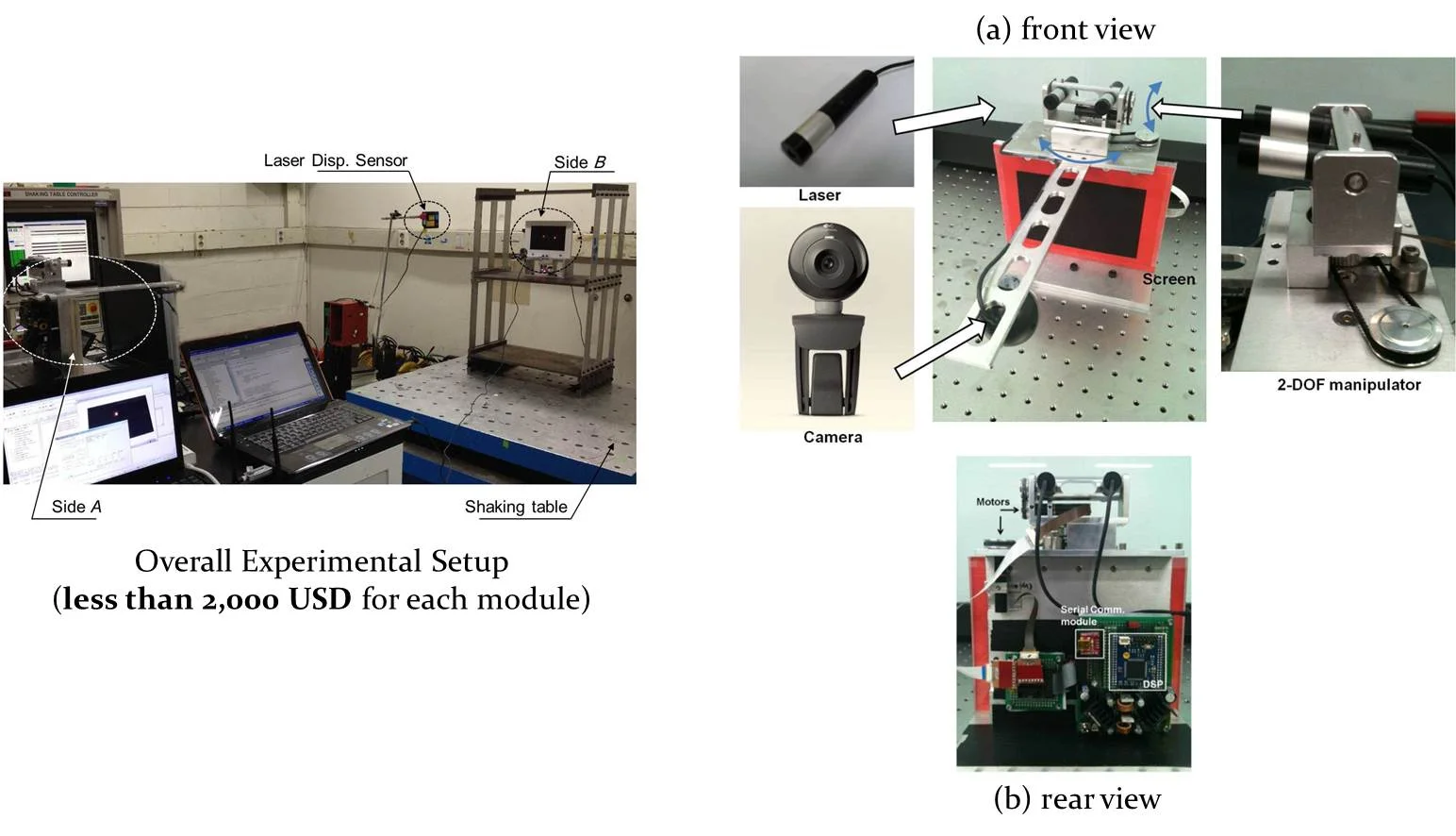
구조물 건전성 모니터링(SHM) 로봇 시스템: ViSP(시각 서보 기반 쌍 구조광 시스템)
무선 전력 공급 및 원격 센싱
- 환경 복원 로봇: 이동 및 매니퓰레이션 기반 자동 오염 탐지·정화
- 친환경 로봇 설계: 작업 중 충전, 전력 재생 메커니즘 등
Concept
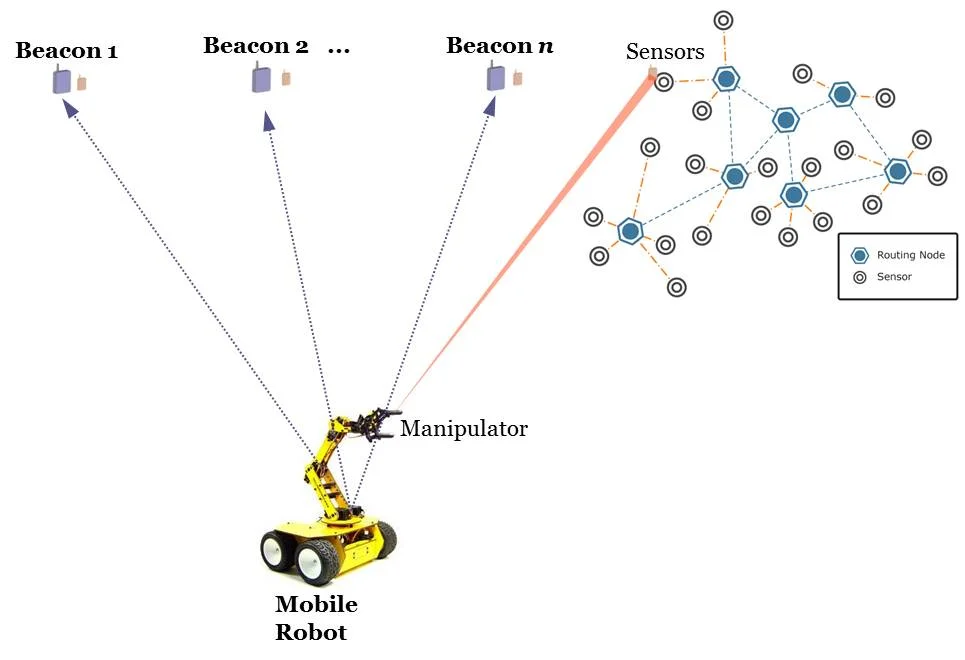
- Yuseok Bang, Joomi Park, and Hyun Myung, “Mobile Robot-Based Visual Targeting for Wireless Power Transmission to WSN,” in Proc. of ASEM11+ (Int’l Conf. on Structural Engineering and Mechanics), Seoul, Sep. 18- 22, 2011.