Autonomous Robot Navigation
-
Vision, LiDAR, magnetic field, beacon-based SLAM (Simultaneous Localization And Mapping)
-
Autonomous navigation of quadruped robots
-
Autonomous navigation of self-driving cars
-
Indoor positioning in a fire disaster situation
-
UAV (Unmanned Aerial Vehicle) navigation
-
Self-localization at GPS outages
-
Underground navigation
-
Autonomous navigation of surface vehicles
-
Underwater robot (AUV, robotic fish) navigation
Quadruped Robot Navigation and Control
- Blind locomotion using IMU and joint encoders with machine learning techniques
- Exteroception & proprioception sensing based state estimation
- Terrain mapping
- Local & global planning
Related papers
- Yeeun Kim, Byeongho Yu, Eungchang Mason Lee, Joon-ha Kim, Hae-won Park, and Hyun Myung, “STEP: State Estimator for Legged Robots Using a Preintegrated Foot Velocity Factor," IEEE RA-L (Robotics and Automation Letters), vol.7, no.2, pp.4456 – 4463, Apr. 2022. [Link]
- I Made Aswin Nahrendra, Byeongho Yu, and Hyun Myung, “DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning ," in Proc. IEEE Int’l Conf. on Robotics and Automation (ICRA), pp. 5078-5084, London, UK, May 2023. [Link]
- I Made Aswin Nahrendra, Minho Oh, Byeongho Yu, Hyungtae Lim, and Hyun Myung, “Robust Recovery Motion Control for Quadrupedal Robots via Learned Terrain Imagination," in Proc. Robotics: Science and Systems (RSS 2023) Workshop, Daegu, Korea, Jul. 2023. [Link]
Snapshots


Videos
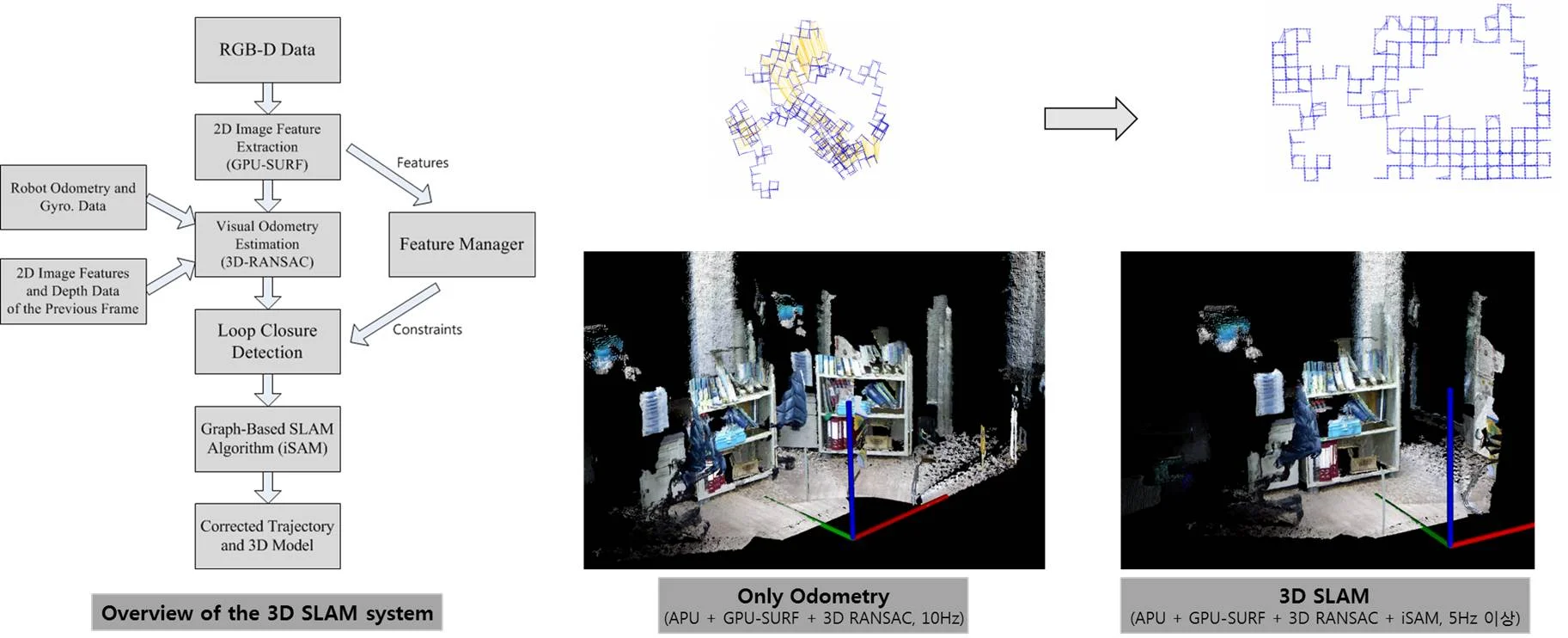
3D SLAM
3D SLAM (Simultaneous Localization And Mapping)
Basic Concept
- Donghwa Lee, Hyun Myung, “Solution to the SLAM Problem in Low Dynamic Environments Using a Pose Graph and an RGB-D Sensor," Sensors, vol.14, no.7, pp.12467-12496, [Link], July 2014.
- Pose Graph-Based RGB-D SLAM in Low Dynamic Environments (Experiment #1)
- Pose Graph-Based RGB-D SLAM in Low Dynamic Environments (Experiment #2)
Related researches to Kinect Navigation Contest (IROS 2014)
- 3D SLAM for low dynamic environment
- Object recognition
- Optimal path planning and replanning
- Dynamic obstacle avoidance
MAV (quadrotor) Navigation and Control
- Path planning, Path following, Obstacle avoidance
- Marker(April Tag)-based landing on a moving vehicle
- Finalist in DJI developer challenge 2016 [Link]
Magnetic field-based SLAM
DV-SLAM (Dual sensor-based Vector-field SLAM)
Seung-Mok Lee, Jongdae Jung, Shin Kim, In-Joo Kim, and Hyun Myung, “DV-SLAM (Dual-sensor-based Vector-field SLAM) and Observability Analysis," IEEE Trans. Industrial Electronics, vol.62, no.2, pp.1101-1112, [DOI], Feb. 2015.

Underground localization
Byeolteo Park and Hyun Myung, “Underground localization using dual magnetic field sequence measurement and pose graph SLAM for directional drilling," Measurement Science and Technology, vol.25, no.12, 125101 (12pp), [DOI], Oct. 2014.

<

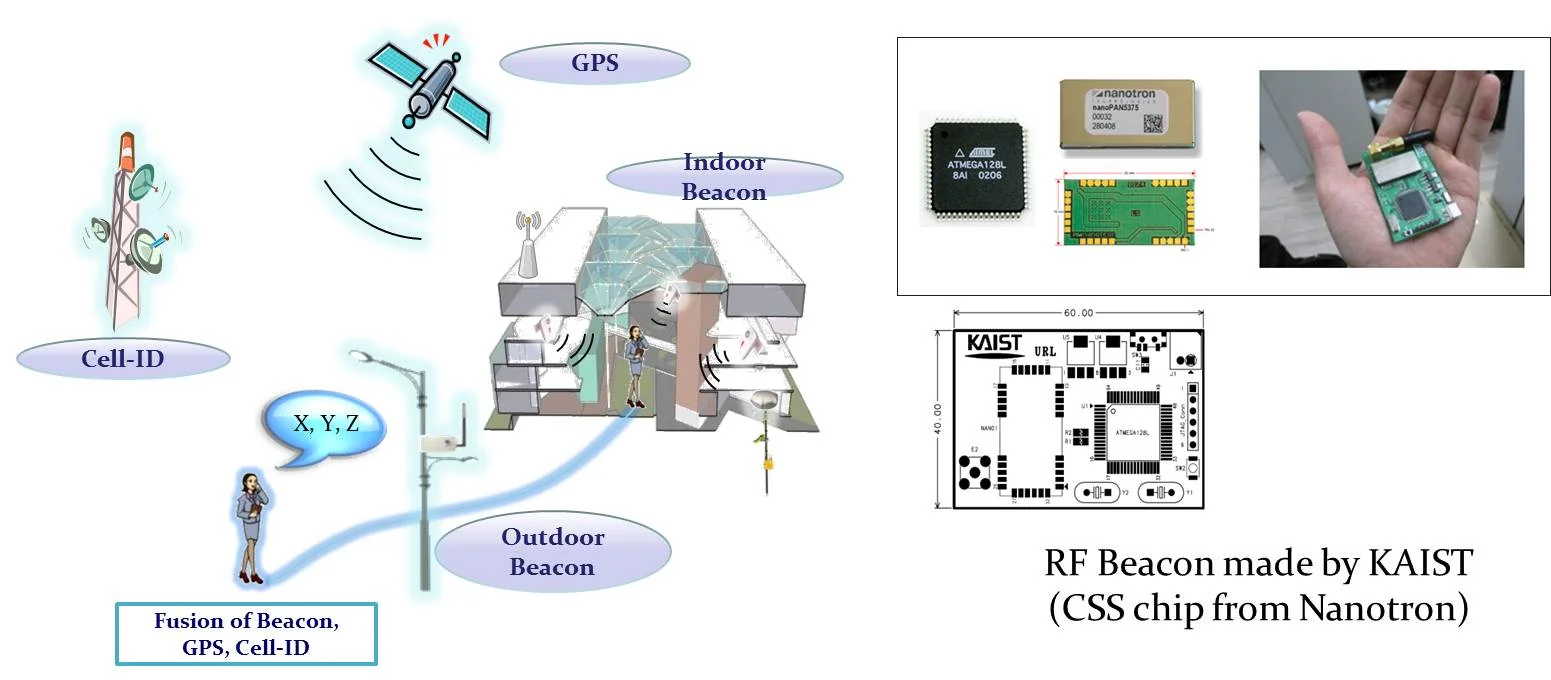
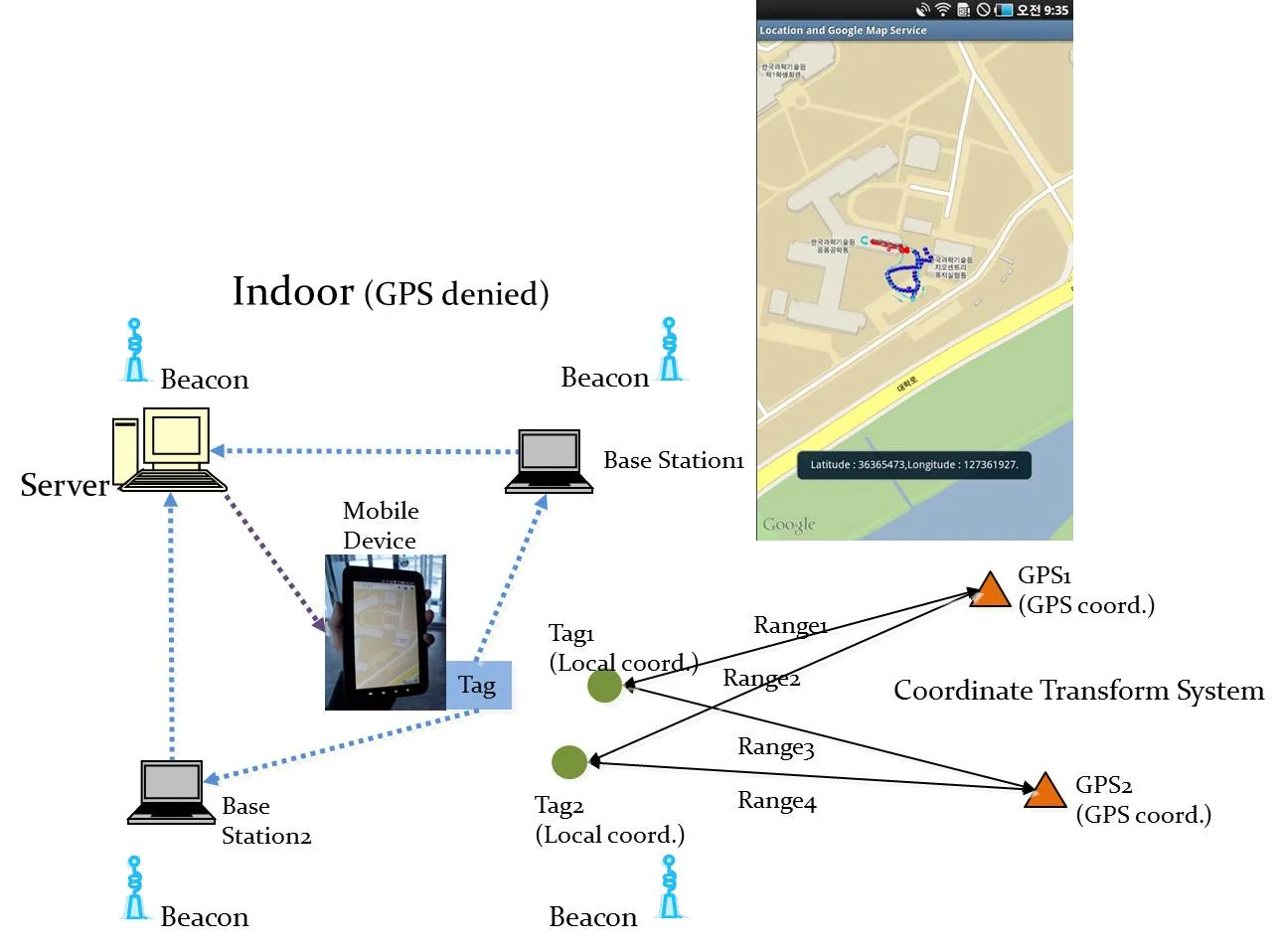
Seamless Localization at Indoor/Outdoor for U-Eco City
Seamless localization at Indoor/Outdoor for U-Eco City
Basic Concept
Localization for Users and Robot
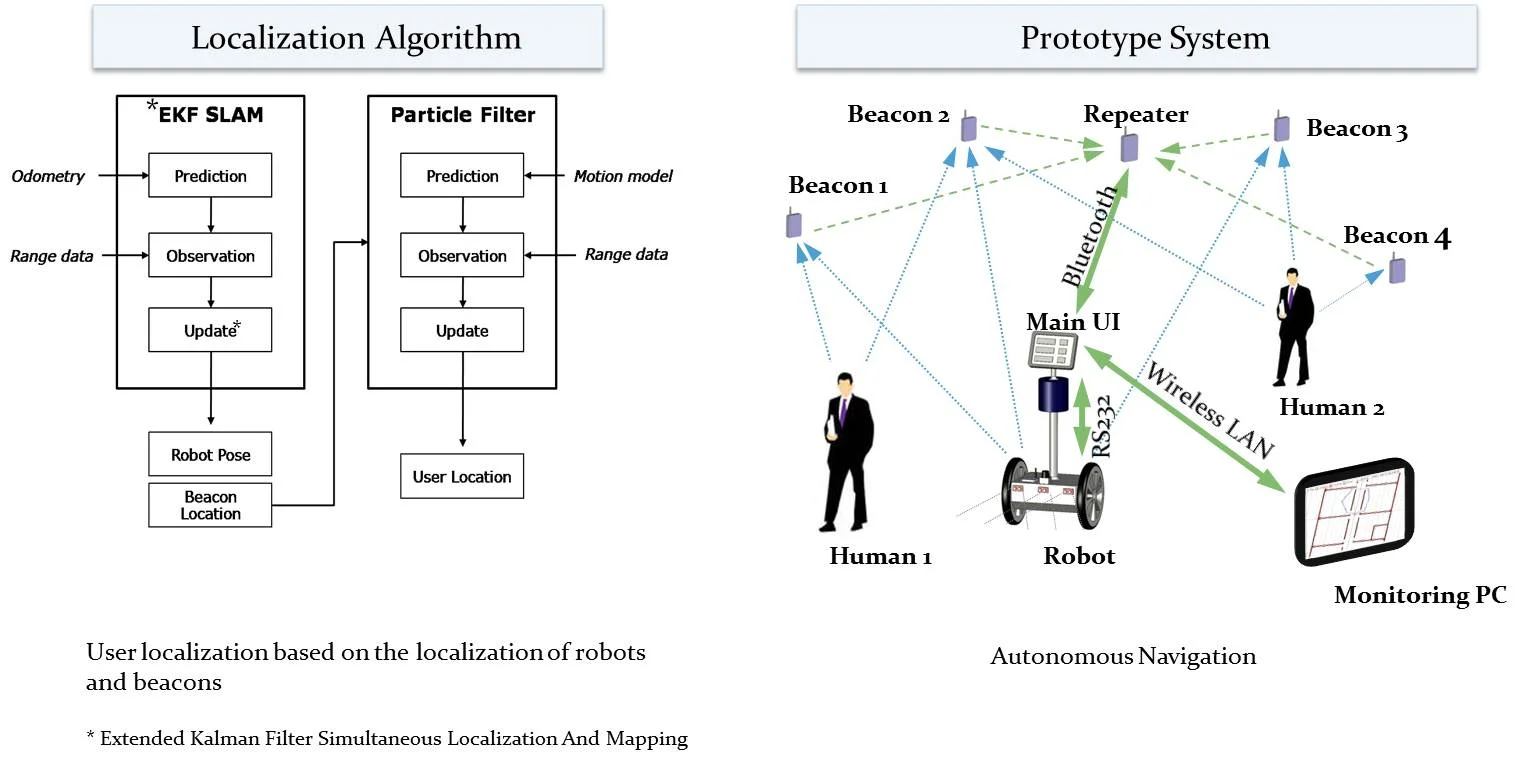
- Jongdae Jung and Hyun Myung, “Indoor Localization Using Particle Filter and Map-based NLOS Ranging Model,” in Proc. of ICRA (IEEE Int’l Conference on Robotics and Automation), pp.5185-5190, Shanghai, China, May 2011.
Seamless Localization for U-Eco City
Robotic Fish (Fibo) for Aquarium
Robotic Fish (Fibo) for Aquarium
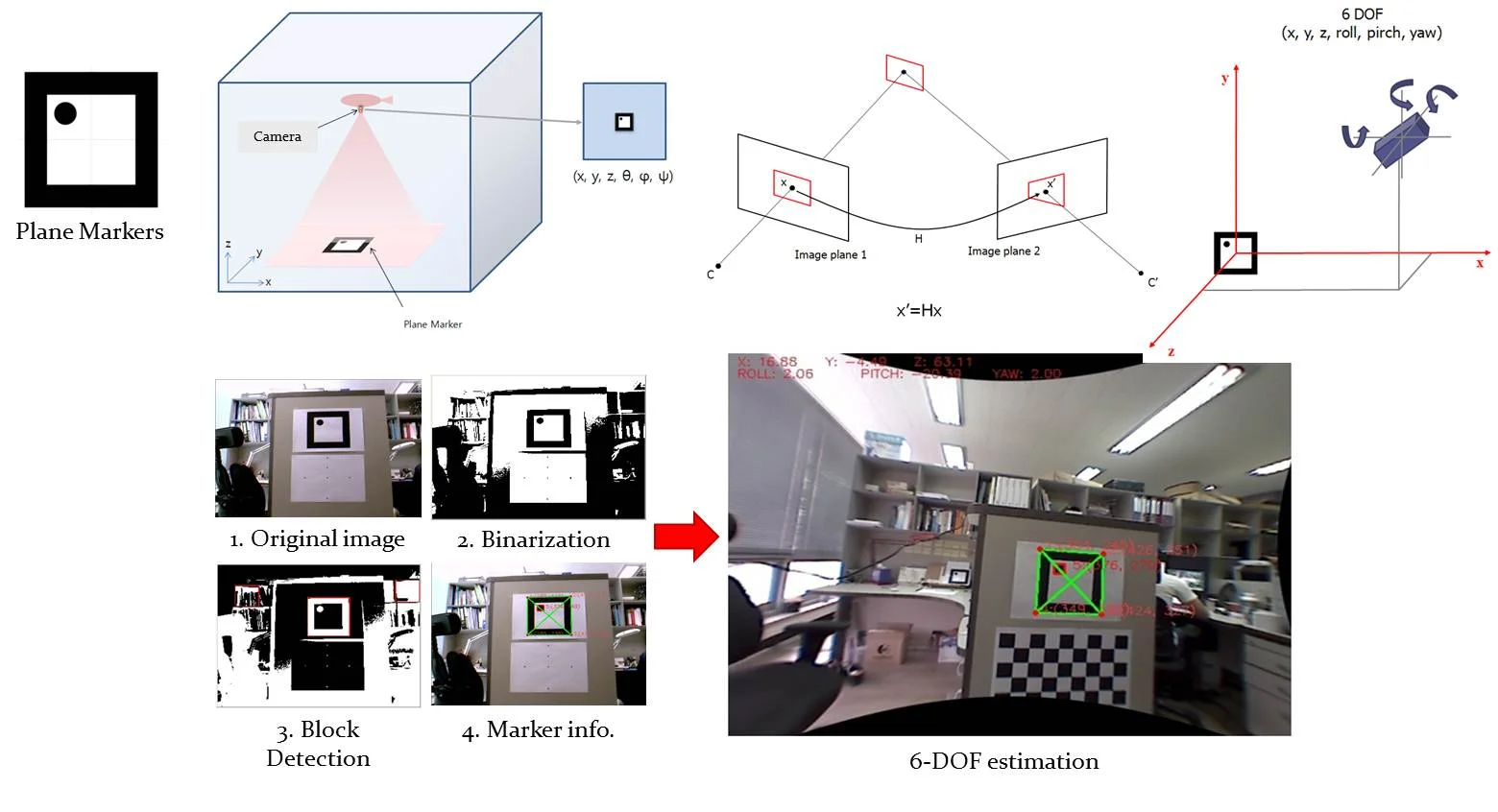
Vision-based Localization
JEROS (Jellyfish Elimination RObotic Swarm)
JEROS (Jellyfish Elimination RObotic Swarm)
System Concept
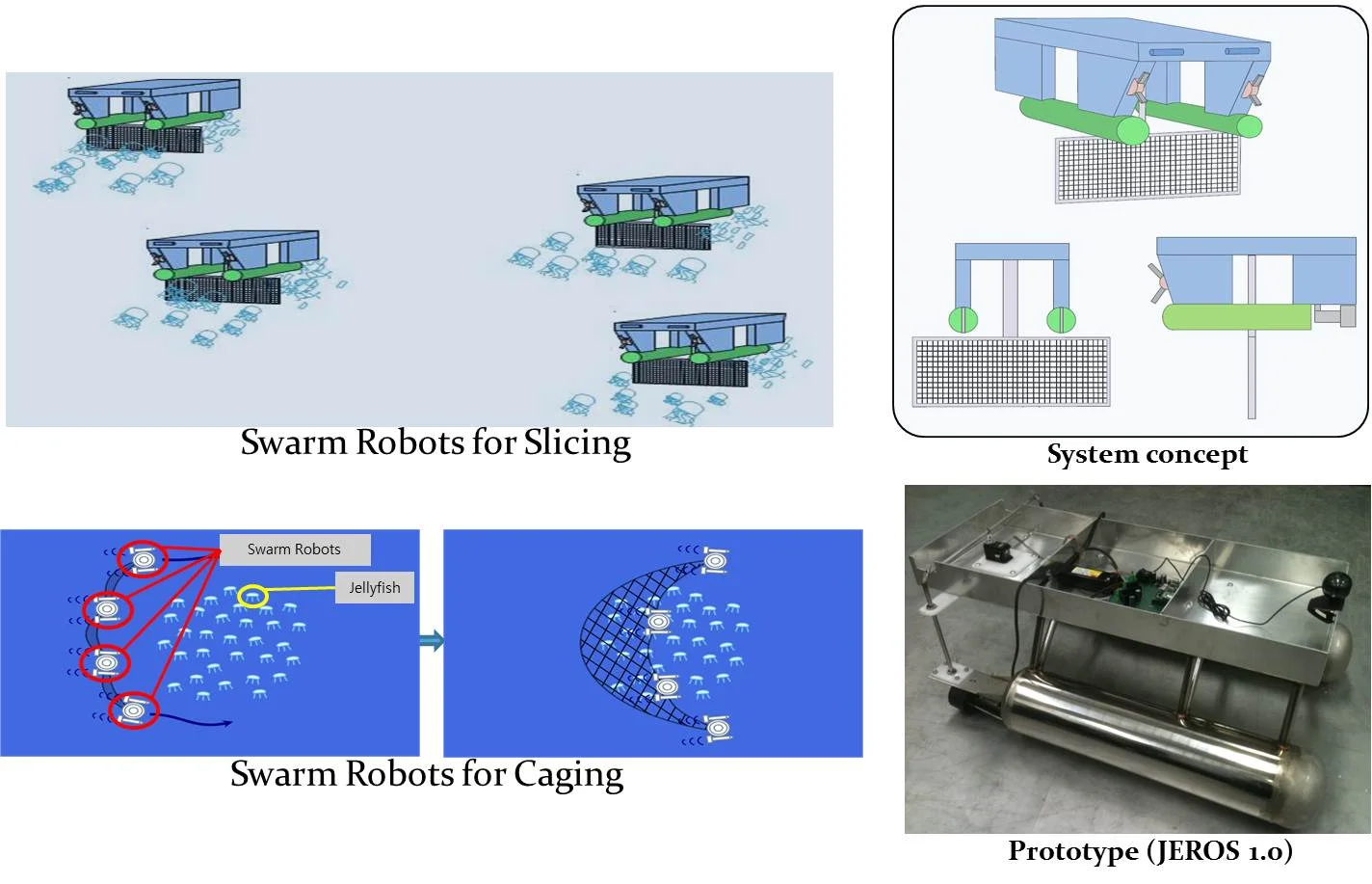
Experiment

JEROS prototype (version 2)

Formation control of JEROS

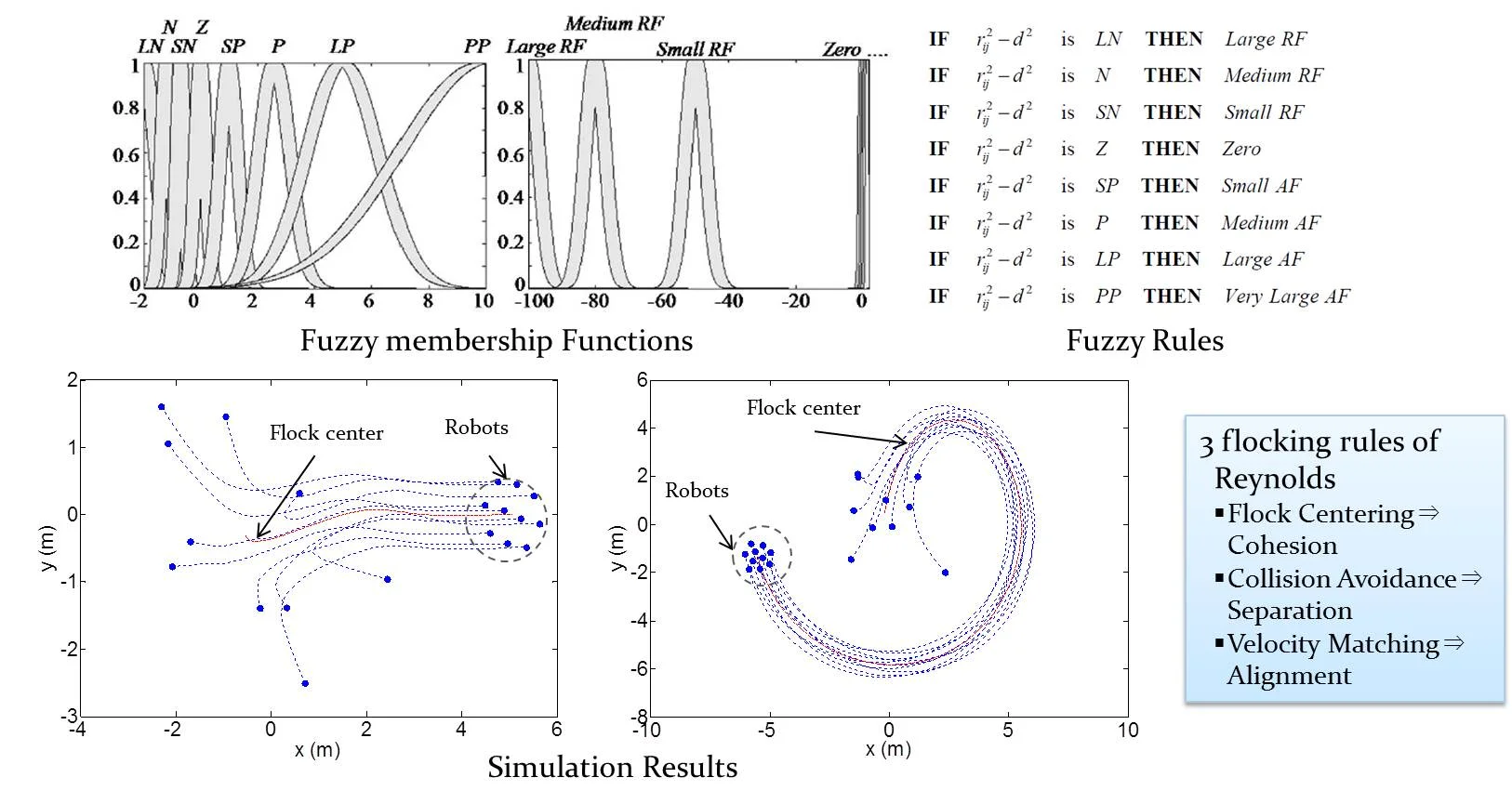
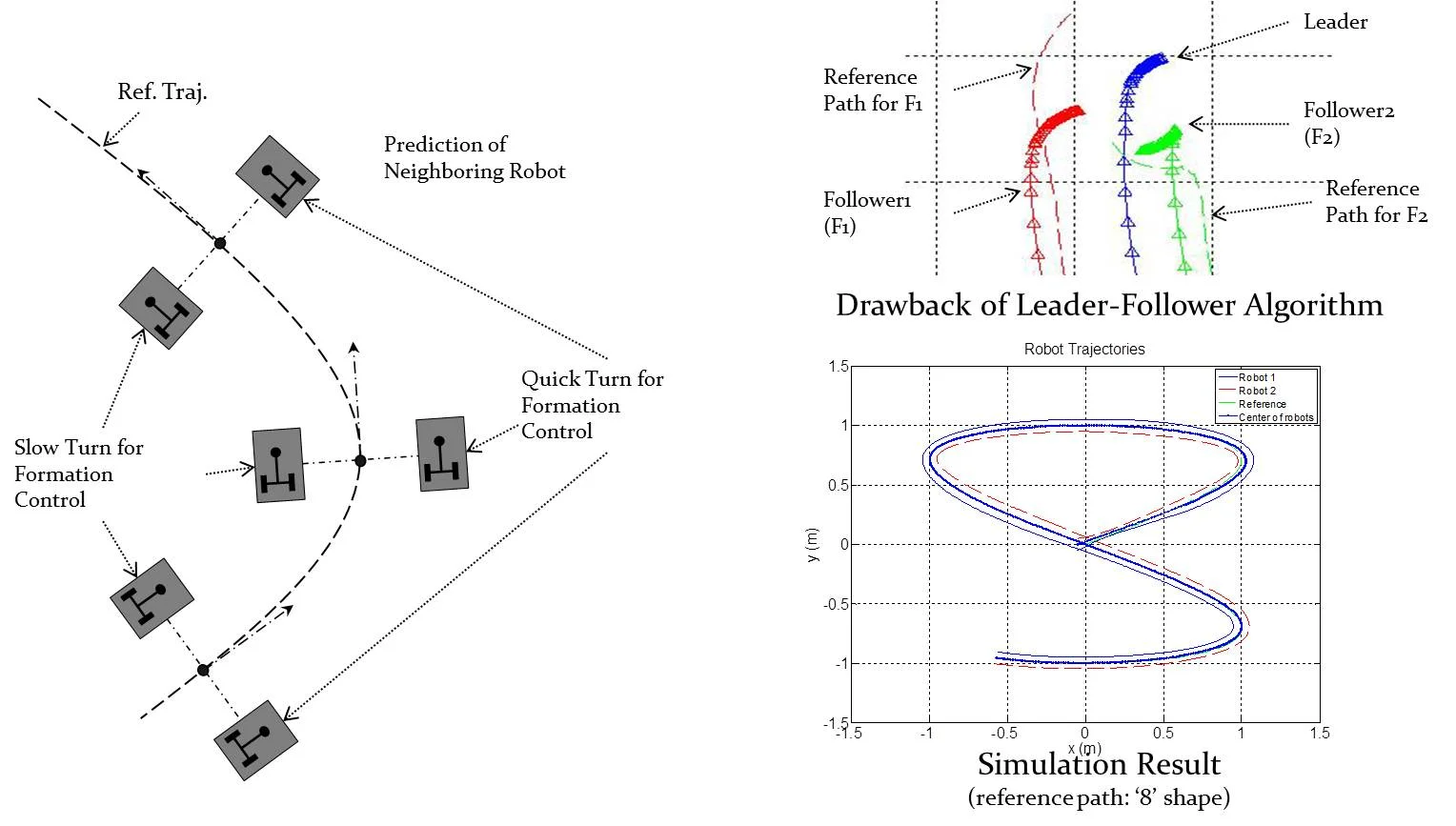
Formation Control for Swarm Robots
Formation Control for Swarm Robots
Using Fuzzy Logic (Type-2) for Decentralized Formation Control
Predictive Control Scheme for Swarm Robots
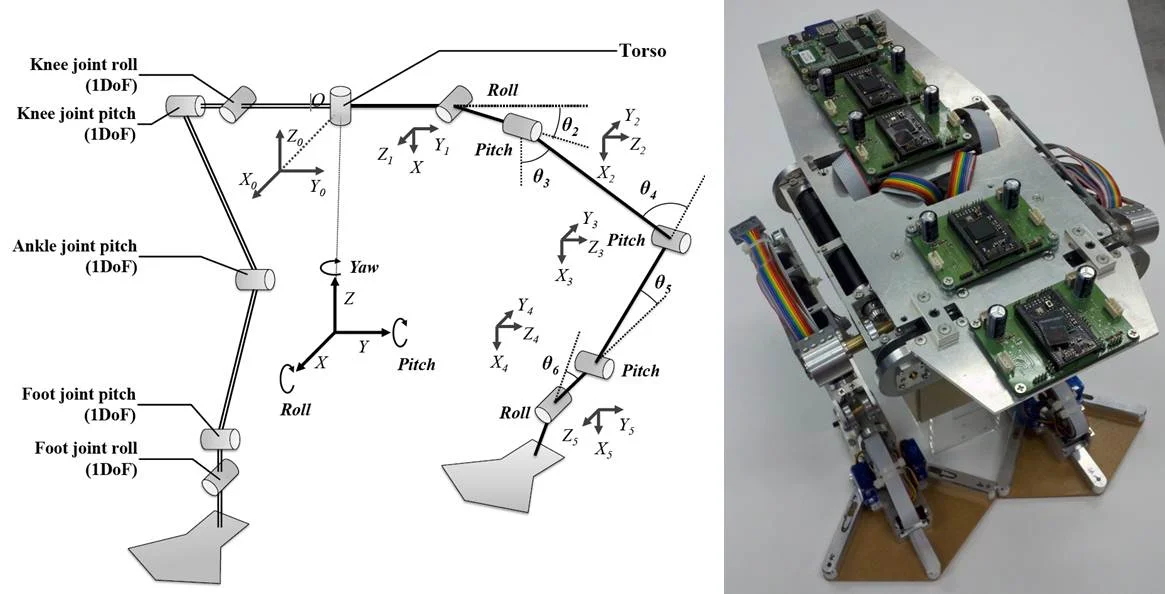
Bird-like Biped Robot for Rough Terrain
Bird-like Biped Robot for Rough Terrain
System Concept Design