


SLAM-based autonomous navigation for outdoor rough terrains
산업체과제
Funding
ND
기간
2021.01. ~ 2022.05.
조회
3253
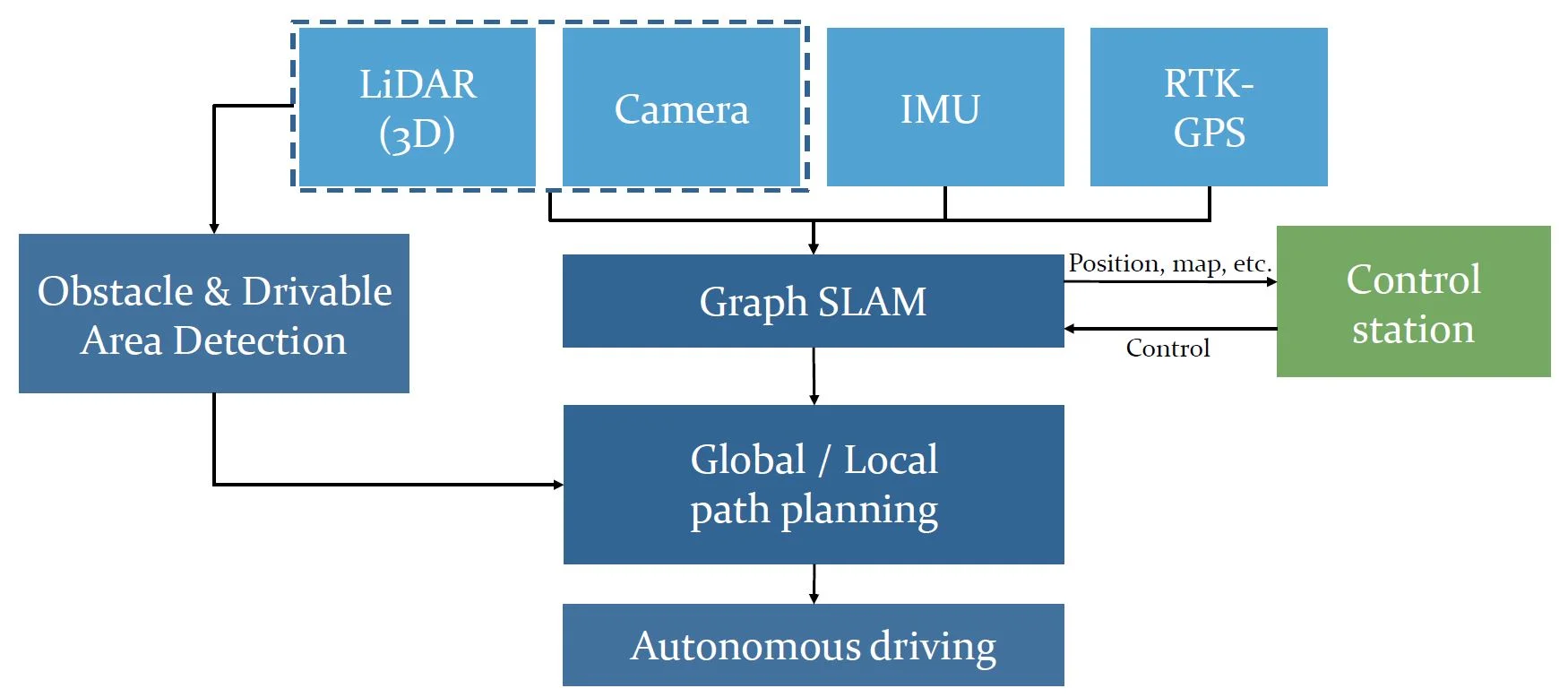
지상 야지환경에서의 SLAM 기반 경로 계획 자동생성 기술 개발
- 센싱 시스템 테스트베드 설계/제작
- 장애물 인식 및 회피 알고리즘 개발
- 야지환경에서 목표지점까지의 자율주행기술 및 통신두절시 경로복귀 자율주행 기술개발
- 실환경에서의 SLAM 기반 맵생성, 경로생성 및 복귀기술 등에 대한 통합시험