


2022 IEEE RA-L Best Paper Award
Author
URL admin
Date
2023-06-15 21:32
Views
2070
Prof. Myung's team received the Best Paper Award of 2022 IEEE RA-L (Robotics and Automation Letters)
Prof. Myung Hyun's team proposed a solution that enables real-time autonomous robot navigation through the estimation of the surrounding environment’s traversable area and object recognition, and received the Best Paper Award of 2022 IEEE RA-L (Robotics and Automation Letters).Please refer to https://www.ieee-ras.org/publications/ra-l/ra-l-paper-awards

<2022 IEEE Robotics and Automation Letters Best Paper Award 저자. 왼쪽부터 명현 교수, 송원호 박사과정, 오민호 박사과정, 이응창 박사과정, 임형태 박사>
명현 교수 연구팀의 오민호 박사과정, 정의곤 석사(현 네이버랩스 소속), 임형태 박사, 송원호 박사과정, 허수민 석사(현 스트라드비전 소속), 이응창 박사과정이 LIG넥스원과의 산학협업을 통해 작성한 논문이 동일 학술대회인 2023 IEEE ICRA 기간 중 6월 1일 열린 시상식에서 2022년 IEEE 국제 로봇/자동화 저널(RA-L, Robotics and Automation Letter) 최우수 논문상(Best paper award)을 수상했다.
연구팀의 논문은 세계적 권위 저널인 RA-L에 2022년 한해 동안 출간된 1,100여 편의 논문 중 편집위원회의 심사를 거쳐 5편의 최우수 논문 중 한편으로 선정됐고, 상패와 함께 상금을 수여받을 예정이다. (논문 제목: “TRAVEL: Traversable Ground and Above-Ground Object Segmentation Using Graph Representation of 3D LiDAR Scans”)
※ 저자 구성: 오민호 박사과정, 정의곤 석사, 임형태 박사, 송원호 박사과정, 허수민 석사, 이응창 박사과정 (이상 KAIST), 박정희 선임연구원, 김재경 단장, 이장우 선임연구원 (이상 LIG넥스원), 명현 교수 (KAIST)

<2022 IEEE Robotics and Automation Letters Best Paper Award 주 저자. 왼쪽부터 임형태 박사 (3저자), 오민호 박사과정 (공동 1저자), 명현 교수 (교신 저자), 정의곤 석사 (공동 1저자)>
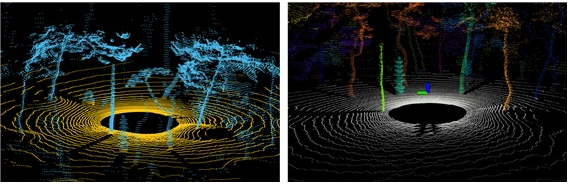
<숲과 같은 비정형 환경에서의 TRAVEL 알고리즘 기반 이동 가능 영역 탐지 및 객체 인식 결과 예시>
본 논문에서 명현 교수 연구팀은 미지의 탐사 환경에서도 지상 로봇이 안전하게 작동하며 임무를 수행할 수 있는 자율주행 시스템을 제안했다. 특히, 지상 로봇이 도심 환경 및 숲과 같은 험난한 비정형 환경과 같은 다양한 환경에서도 그래프 구조 기반의 이동 가능 영역 탐지 및 주변 환경의 객체 인식을 통해 실시간으로 자율주행이 가능하도록 솔루션을 제안했다.또한, 연구팀은 실제 자율주행 시스템에 적용하여 실용성을 입증한 바 있으며, 해당 기술을 공개함으로써 로봇 자율 주행 기술 발전에 이바지했다. (공개 링크: https://github.com/url-kaist/TRAVEL)
명현 교수는 “자체적으로 확보한 슬램(SLAM) 기술이 세계적으로 인정받는 기회였고, 이를 통해 다양한 자율 주행, 보행, 비행에 활용하여 로봇 산업 발전에 이바지 할 수 있으리라 생각한다”라고 수상 소감을 밝혔다.