


Environmental Robotics
- Ubiquitous robot design for environmental inspection and surveillance
- Eco-systematic robot design: Rechargeable during its working, Power reproduction mechanism, etc.
- Environmental rehabilitation robot: Automatic pollution detection and purification by using manipulation and mobility
Vertical Structure Inspection using MAV (Micro-Aerial Vehicle)
Vertical Structure Inspection using MAV (Micro-Aerial Vehicle)
Concept

CAROS (Climbing Aerial RObot System)-Q / Recent version
- Hyungyu Lee, Myeongwoo Jeong, Chanyoung Kim, Hyungtae Lim, Changgue Park, Sungwon Hwang, and Hyun Myung, “Low-level Pose Control of Tilting Multirotor for Wall Perching Tasks Using Reinforcement Learning,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 9669-9676.
- Hyungyu Lee, Byeongho Yu, Christian Tirtawardhana, Chanyoung Kim, Myeongwoo Jeong, Sumin Hu, and Hyun Myung, “CAROS-Q: Climbing Aerial RObot System Adopting Rotor Offset With a Quasi-Decoupling Controller,” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8490-8497, 2021.
CAROS (Climbing Aerial RObot System)
- Wancheol Myeong, Seungwon Song, Kwangyik Jung, and Hyun Myung, “Development of Soft Perching System using Tilting Mechanism for Wall-Climbing Drone," in Proc. of IEEE/RSJ Int’l Conf. on Intelligent Robots and Systems (IROS), Vancouver, Canada, Sep. 24 – 28, 2017.
- Sungwook Jung, Jae-Uk Shin, Wancheol Myeong, and Hyun Myung, “Mechanism and system design of MAV(Micro Aerial Vehicle)-type wall-climbing robot for inspection of wind blades and non-flat surfaces," in Proc. of Int'l Conf. on Control, Automation and Systems (ICCAS), pp. 1757-1761, Busan, Korea, Oct. 13-16, 2015.
FAROS (Fire-proof Aerial RObot System)
- Wancheol Myeong, Kwangyik Jung, and Hyun Myung, “Development of FAROS (fire-proof drone) using an aramid fiber armor and air buffer layer," in Proc. of Int'l Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), pp. 204-207, Jeju, Korea, June 28-July 1, 2017.
Vision-based Displacement Measurement of PC Bridge Members
Vision-based Displacement Measurement of PC Bridge Members
- Marker and camera-based pose estimation
- Multiple marker-based displacement measurement system

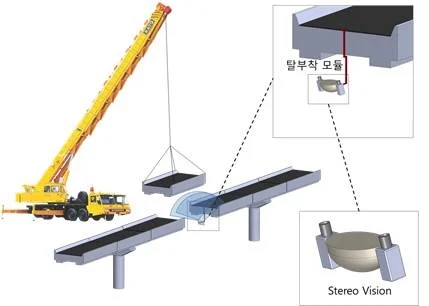
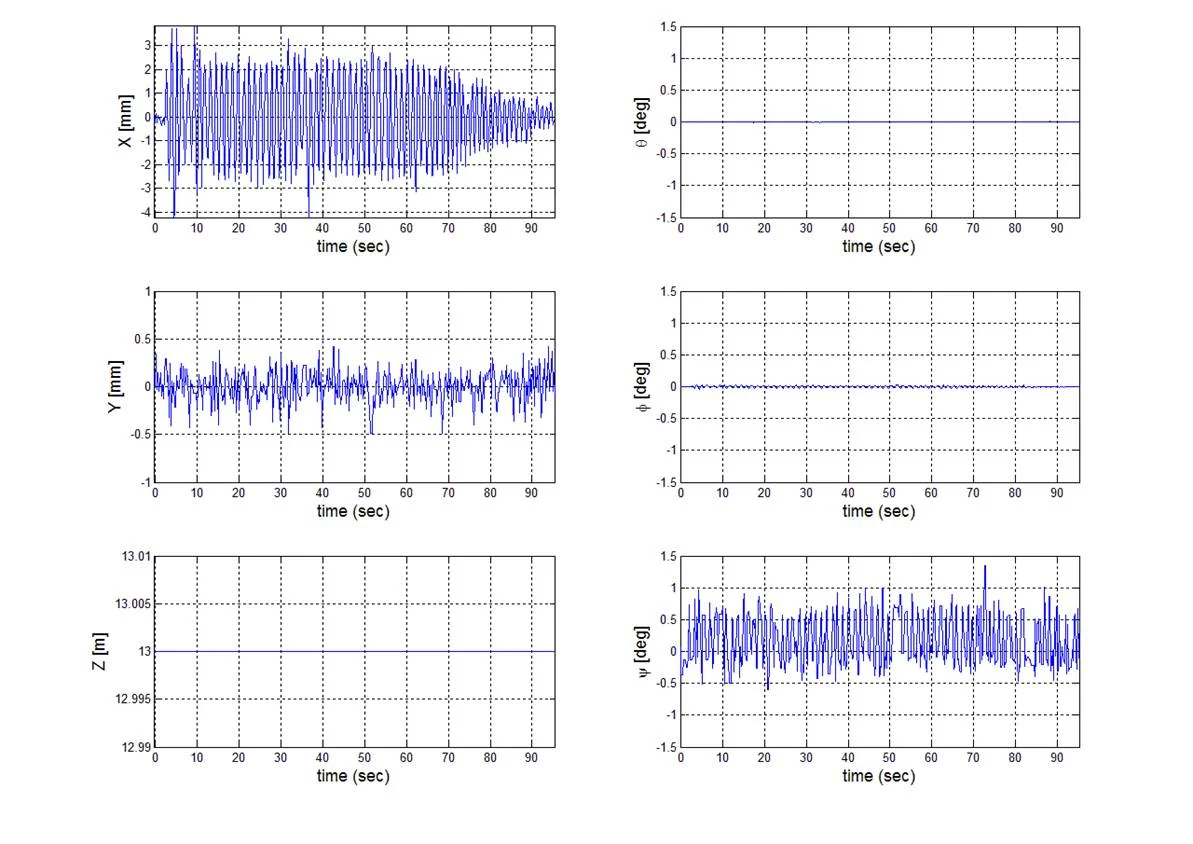
SHM (Structural Health Monitoring) robot system: ViSP (Visually Servoed Paired Structured Light)
SHM (Structural Health Monitoring) robot system: ViSP (Visually Servoed Paired Structured Light)
- YouTube video clip
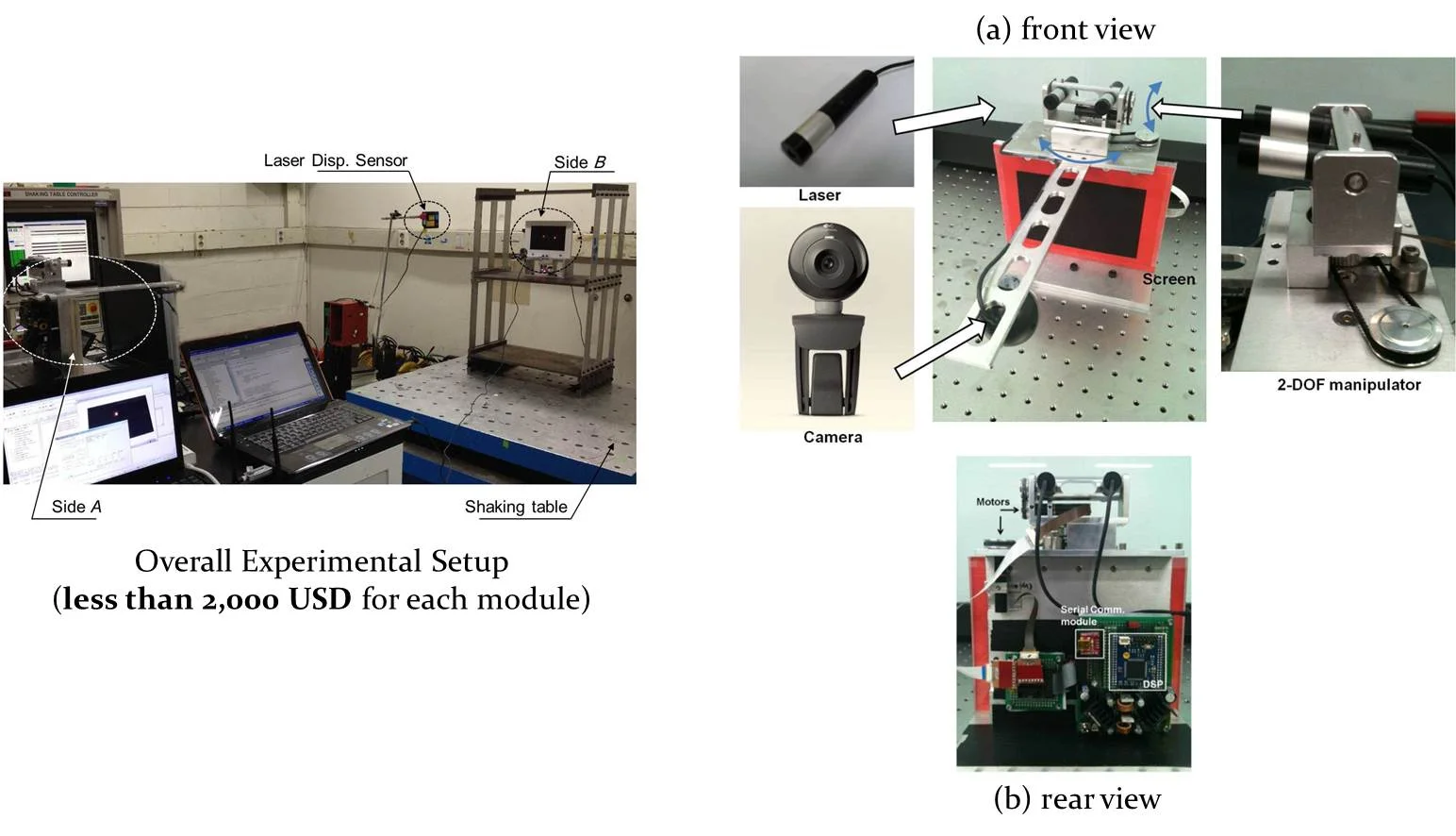
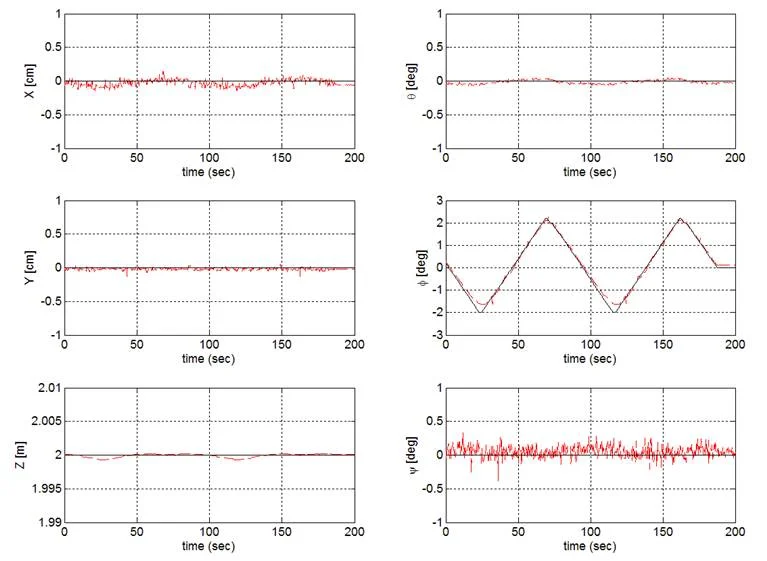
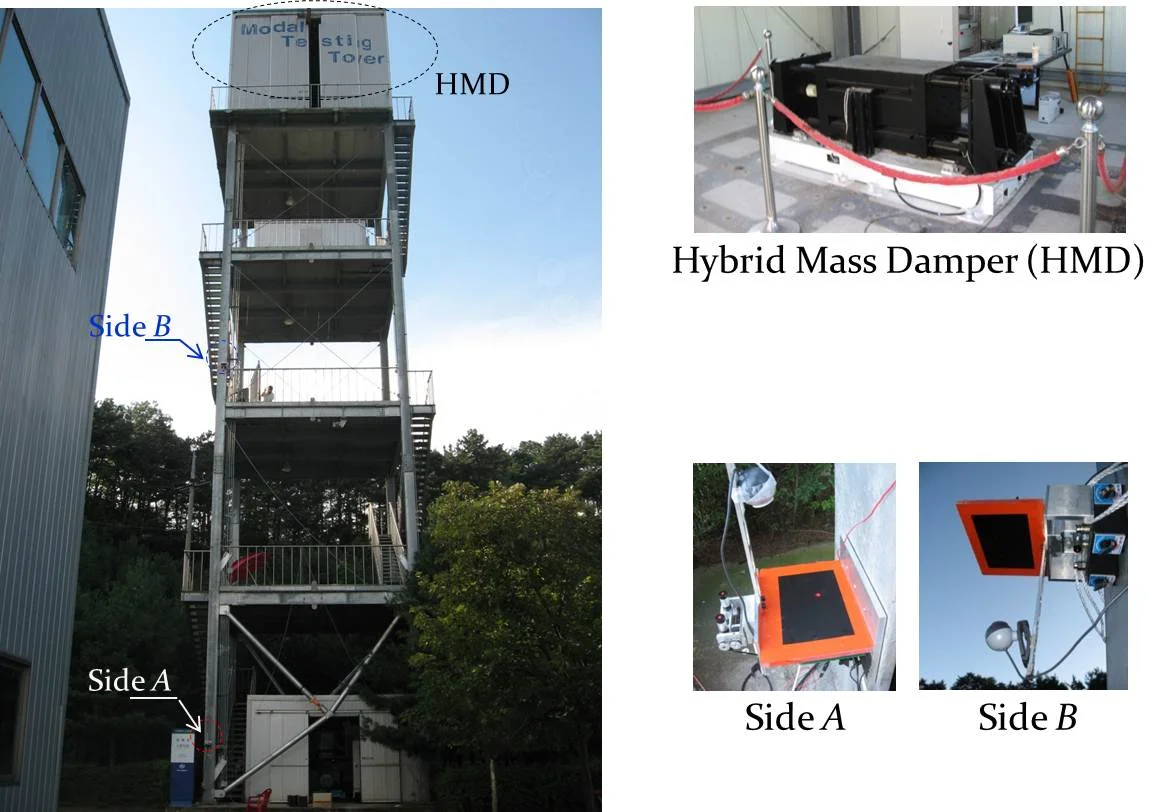
- Experimental Setup for Indoor
Wireless power supply and remote sensing
Wireless power supply and remote sensing
Concept
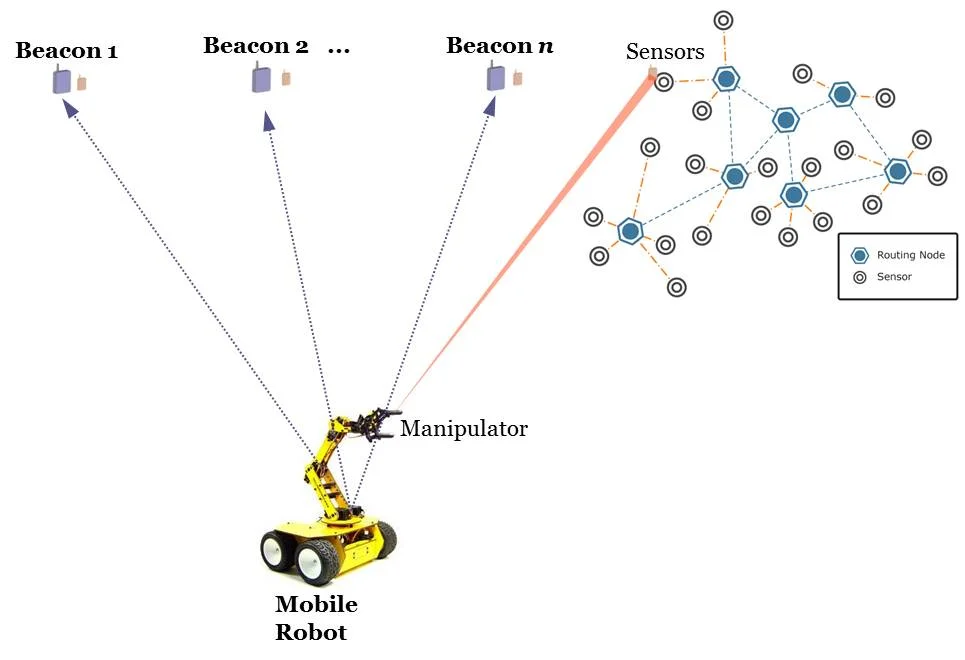
- Yuseok Bang, Joomi Park, and Hyun Myung, “Mobile Robot-Based Visual Targeting for Wireless Power Transmission to WSN,” in Proc. of ASEM11+ (Int’l Conf. on Structural Engineering and Mechanics), Seoul, Sep. 18- 22, 2011.