


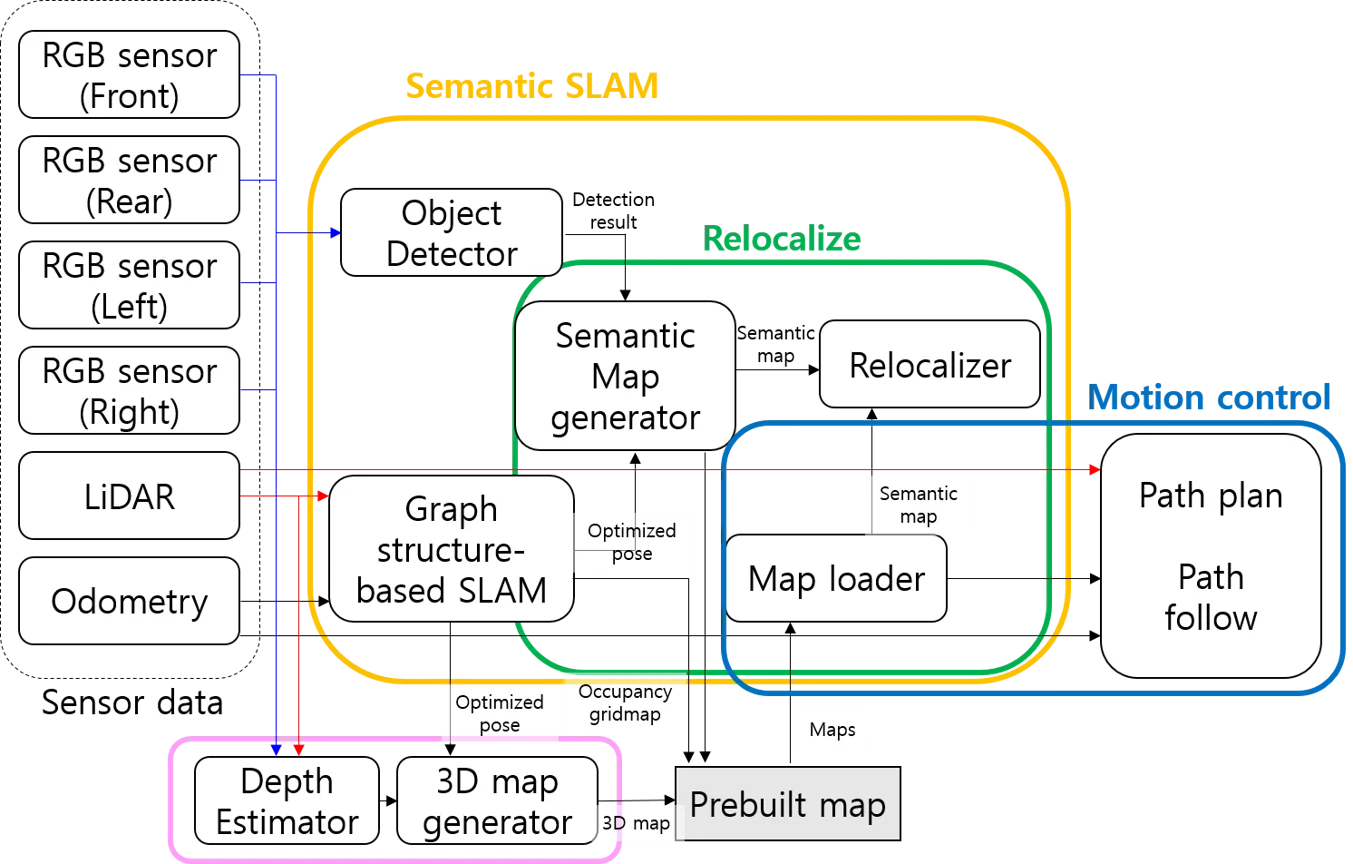
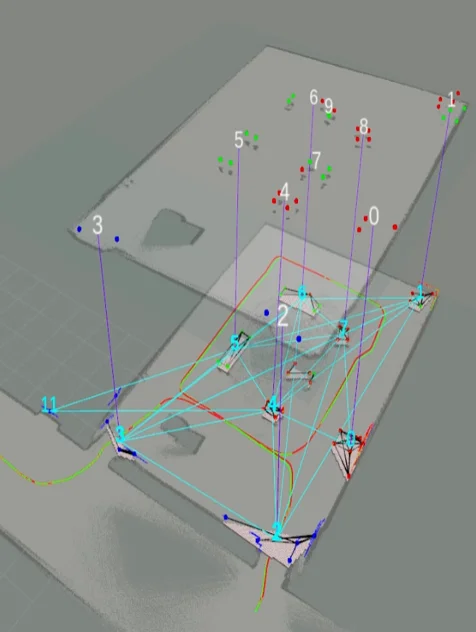
Next generation intelligent assistant and its core technologies (Semantic SLAM)
산업체과제
Funding
Major company
Period
2017.06. ~ 2019.05.
Views
2497
Title: 차세대 Intelligent Assistant 및 요소기술 개발
- 딥러닝 기반 물체인식을 통한 이동 로봇의 실내 내비게이션 성능 향상 (Improvement of indoor navigation using deep learning-based object recognition): Semantic SLAM
- 자기장과 RGB-D을 융합한 이동 로봇의 실내 내비게이션 (Indoor navigation of mobile robots fusing the magnetic sensor and the RGB-D sensor)