


2022년 미래도전 국방기술 경진대회 수상
Author
Hyun Myung
Date
2022-11-10 13:48
Views
2103
명현 교수 연구실 QAIST++팀 (팀장: 이응창 박사과정, 팀원: 송승원, 최준호, I Made Aswin Nahrendra, 최덕규 박사과정, 이승현 석사과정) 이 2022년 10월 20일 진행된 미래도전 국방기술 경진대회 (전장상황에서의 자율비행 기술경진대회 III) 에 참가해 유일하게 전체 코스를 완주하고 상금을 수상했다 (장려금 500만원, 참가 격려금 400만원, 총 900만원 수상). 시상식은 11월 6일 대전 지능로봇산업화센터에서 진행되었다.
본 대회는 방위사업청, 대전광역시에서 주최하고, 국방과학연구소, 대전테크노파크 주관으로 진행되었다. 본 대회는 자율 비행 드론을 이용하여 야지 환경과 같이 복잡하고 위험한 야외 장애물을 통과하고, 2층 규모의 건물에 침투해 숨겨져 있는 표적을 탐지하고, 표적의 종류와 좌표를 포함한 정밀한 3차원 지도를 작성 후, 안전하게 출발점으로 복귀하는 전장 상황을 가정한 임무 수행을 목표로 한다.
본선 진출 10개팀 중 명현 교수 연구팀만이 유일하게 전체 구간을 완주하고 출발점 복귀에 성공했으며, 숨겨져 있는 표적들을 탐지하고, 3차원 지도를 작성하였다. 이를 위해 라이더-관성 항법 (LiDAR-Inertial Odometry) SLAM 알고리즘과 장애물 회피 경로 생성 기술, 미지 영역 탐사 알고리즘, AI 기반 표적 탐지 및 3차원 좌표 추정 알고리즘 등을 모두 자체 개발하였고, 실시간으로 동작하기 위해 최적의 센서 시스템을 탑재한 가볍고 작은 드론 플랫폼을 자체 제작하였다.
Professor Myung's team wins the 2022 Future Challenge Defense Technology Contest
The QAIST++ Team (Team Leader: Eungchang Lee Ph.D. course, Team Leader: Seungwon Song, Junho Choi, I Made Aswin Nahrendra, Dukkyu Choi, Ph.D. course, Seunghyun Lee, Master’s course) in Prof. Hyun Myung’s lab, participated in the autonomous flight technology contest III held on October 20, 2022 and was the only one to complete the entire course and win a prize (9 million KRW in total). The award ceremony was held on November 6 at the Intelligent Robot Industrialization Center in Daejeon.
This competition was hosted by the Defense Acquisition Program Administration and Daejeon Metropolitan City, and was sponsored by the Agency for Defense Development and Daejeon Techno Park. This competition uses autonomous flying drones to pass through complex and dangerous outdoor obstacles such as field environments, penetrate a two-story building to detect hidden targets, and create precise 3D maps including target types and coordinates. Afterwards, the goal is to perform a mission assuming a battlefield situation to safely return to the starting point.
Among the 10 teams that advanced to the finals, Professor Myung’s team was the only one who completed the entire section and successfully returned to the starting point, detecting hidden targets, and creating a 3D map. To this end, the LiDAR-Inertial Odometry SLAM algorithm, obstacle avoidance path generation technology, unknown area exploration algorithm, AI-based target detection and 3D coordinate estimation algorithm were all developed by their own. They made their own lightweight and small drone platform equipped with an optimal sensor system.
Competition movie clip: https://youtu.be/GliSRAUgi2s

(좌로부터 최덕규, 이응창 (팀장), 최준호, 이승현 학생)

(시상식 장면)
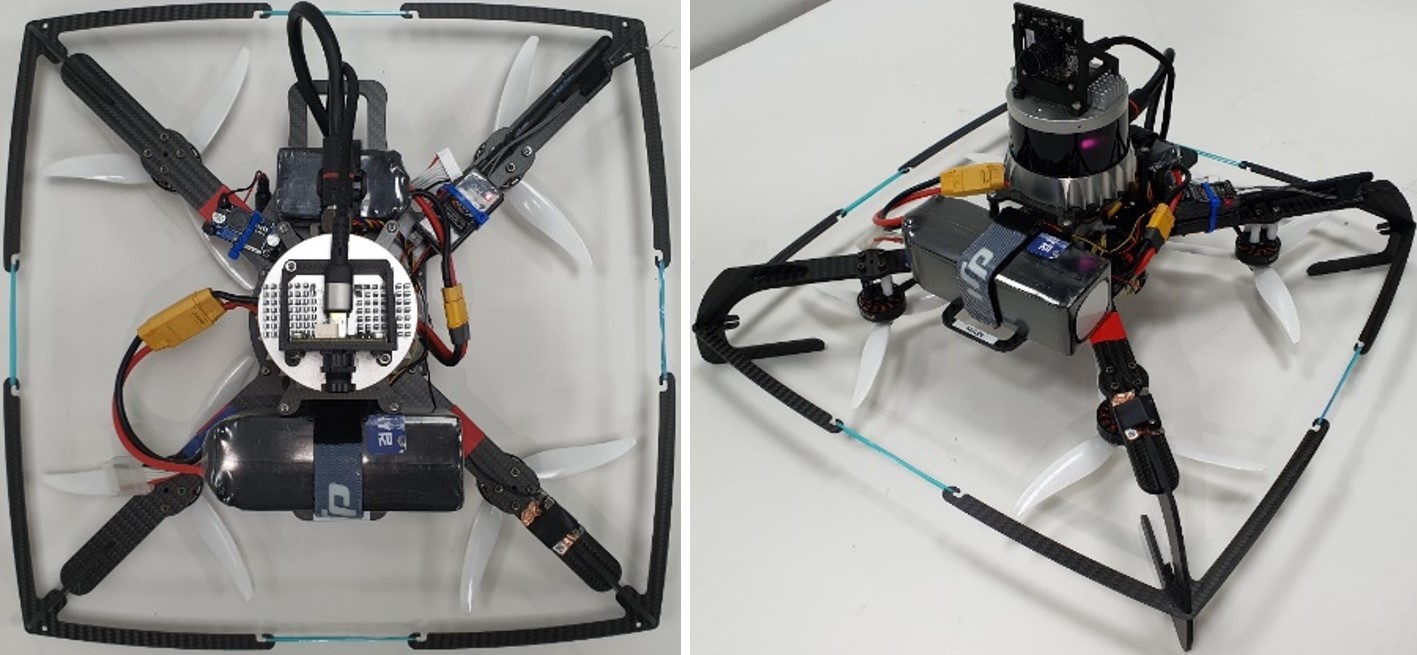 (자체 제작한 드론 시스템)
(자체 제작한 드론 시스템)
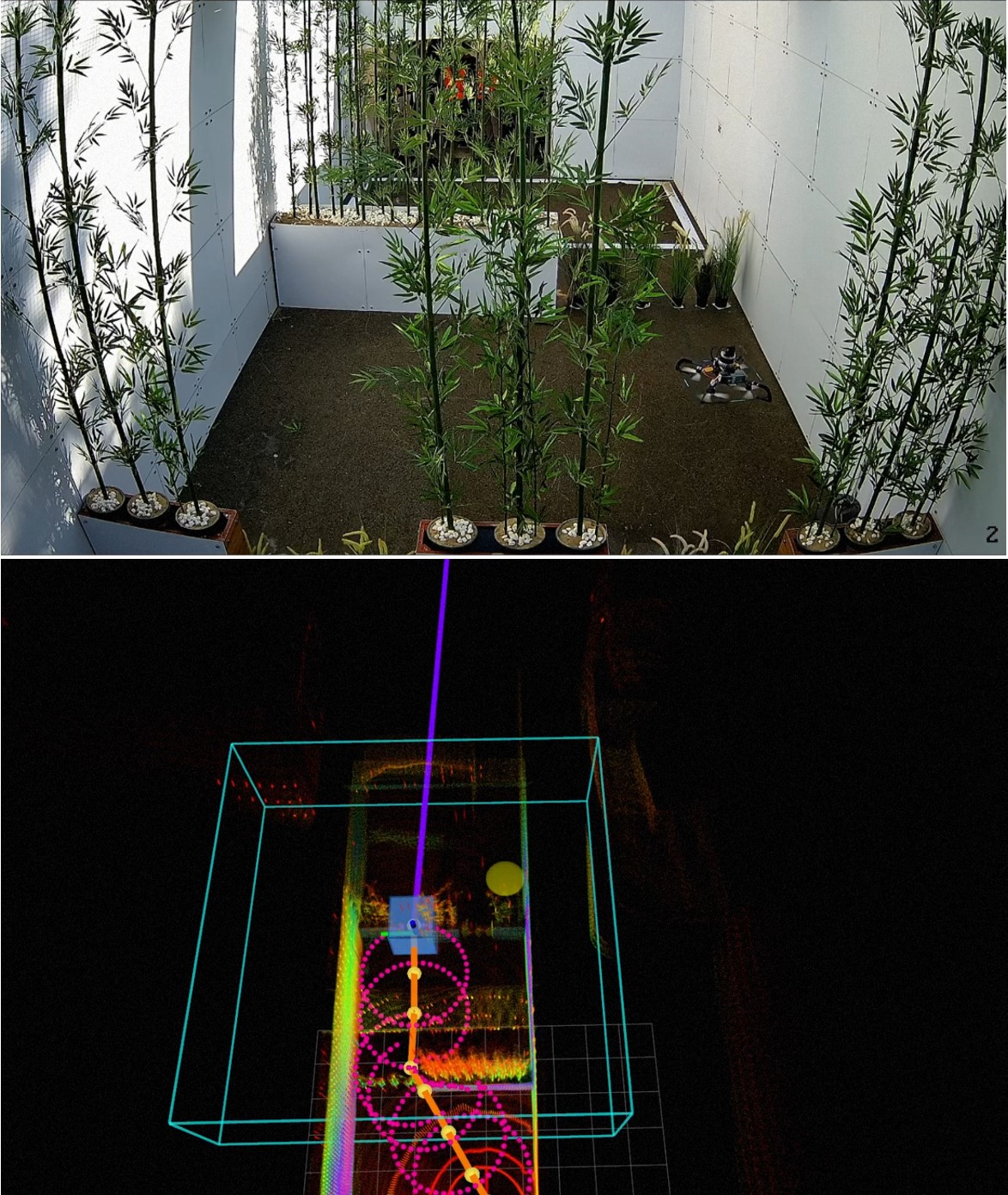 (경진 대회 중 드론의 자율 비행 장면 및 작성된 3차원 지도)
(경진 대회 중 드론의 자율 비행 장면 및 작성된 3차원 지도)
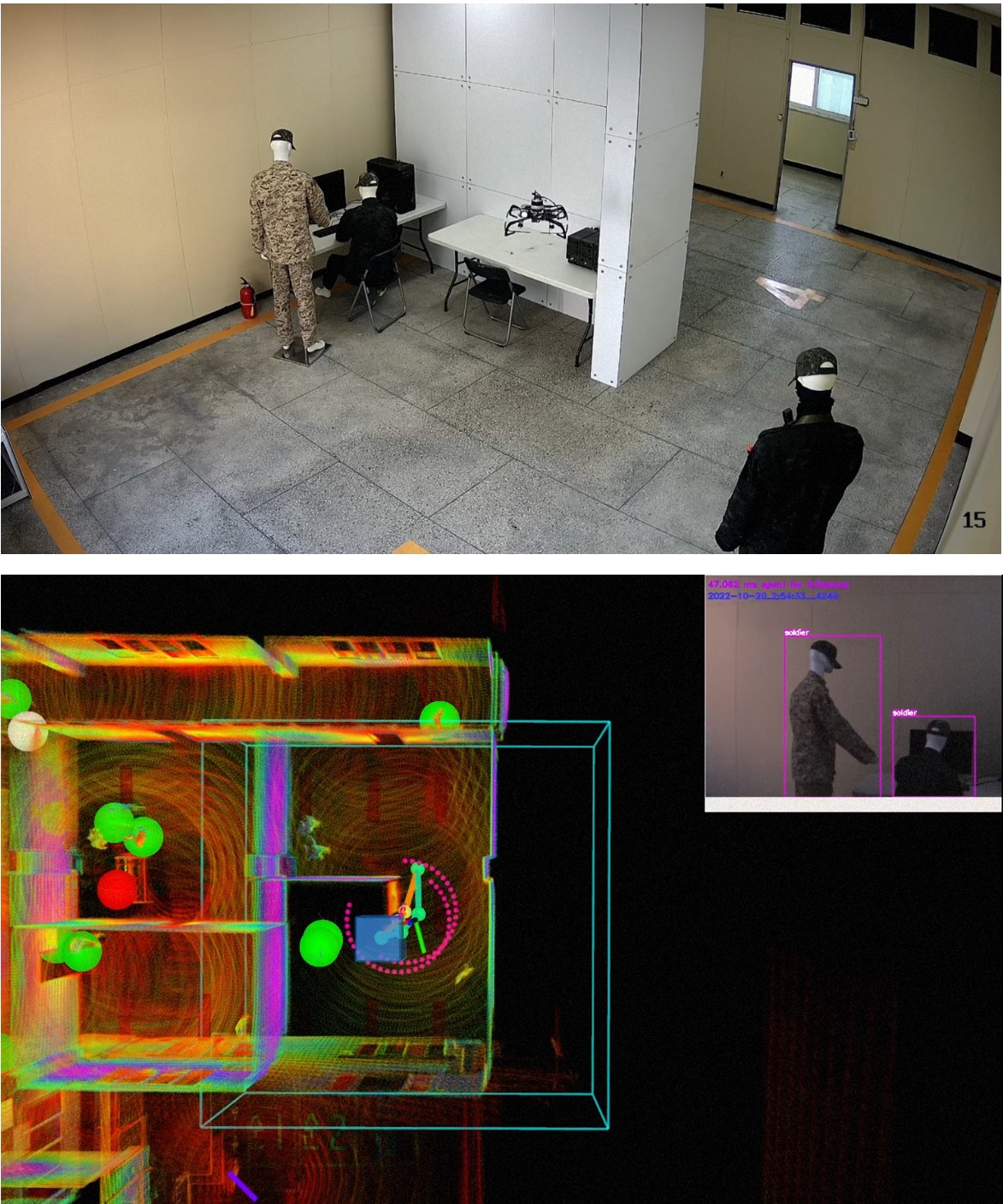 (경진 대회 중 드론의 자율 비행 장면 및 작성된 3차원 지도)
(경진 대회 중 드론의 자율 비행 장면 및 작성된 3차원 지도)
본 대회는 방위사업청, 대전광역시에서 주최하고, 국방과학연구소, 대전테크노파크 주관으로 진행되었다. 본 대회는 자율 비행 드론을 이용하여 야지 환경과 같이 복잡하고 위험한 야외 장애물을 통과하고, 2층 규모의 건물에 침투해 숨겨져 있는 표적을 탐지하고, 표적의 종류와 좌표를 포함한 정밀한 3차원 지도를 작성 후, 안전하게 출발점으로 복귀하는 전장 상황을 가정한 임무 수행을 목표로 한다.
본선 진출 10개팀 중 명현 교수 연구팀만이 유일하게 전체 구간을 완주하고 출발점 복귀에 성공했으며, 숨겨져 있는 표적들을 탐지하고, 3차원 지도를 작성하였다. 이를 위해 라이더-관성 항법 (LiDAR-Inertial Odometry) SLAM 알고리즘과 장애물 회피 경로 생성 기술, 미지 영역 탐사 알고리즘, AI 기반 표적 탐지 및 3차원 좌표 추정 알고리즘 등을 모두 자체 개발하였고, 실시간으로 동작하기 위해 최적의 센서 시스템을 탑재한 가볍고 작은 드론 플랫폼을 자체 제작하였다.
Professor Myung's team wins the 2022 Future Challenge Defense Technology Contest
The QAIST++ Team (Team Leader: Eungchang Lee Ph.D. course, Team Leader: Seungwon Song, Junho Choi, I Made Aswin Nahrendra, Dukkyu Choi, Ph.D. course, Seunghyun Lee, Master’s course) in Prof. Hyun Myung’s lab, participated in the autonomous flight technology contest III held on October 20, 2022 and was the only one to complete the entire course and win a prize (9 million KRW in total). The award ceremony was held on November 6 at the Intelligent Robot Industrialization Center in Daejeon.
This competition was hosted by the Defense Acquisition Program Administration and Daejeon Metropolitan City, and was sponsored by the Agency for Defense Development and Daejeon Techno Park. This competition uses autonomous flying drones to pass through complex and dangerous outdoor obstacles such as field environments, penetrate a two-story building to detect hidden targets, and create precise 3D maps including target types and coordinates. Afterwards, the goal is to perform a mission assuming a battlefield situation to safely return to the starting point.
Among the 10 teams that advanced to the finals, Professor Myung’s team was the only one who completed the entire section and successfully returned to the starting point, detecting hidden targets, and creating a 3D map. To this end, the LiDAR-Inertial Odometry SLAM algorithm, obstacle avoidance path generation technology, unknown area exploration algorithm, AI-based target detection and 3D coordinate estimation algorithm were all developed by their own. They made their own lightweight and small drone platform equipped with an optimal sensor system.
Competition movie clip: https://youtu.be/GliSRAUgi2s
(좌로부터 최덕규, 이응창 (팀장), 최준호, 이승현 학생)
(시상식 장면)
(자체 제작한 드론 시스템) (경진 대회 중 드론의 자율 비행 장면 및 작성된 3차원 지도) (경진 대회 중 드론의 자율 비행 장면 및 작성된 3차원 지도)