


ICRA 2023 HILTI SLAM Challenge double championship
Author
tp02134
Date
2023-08-23 14:46
Views
1015
Prof. Myung Hyun’s research team achieves a double championship in the IEEE Int'l Conf. Robotics and Automation (ICRA) SLAM Challenge.
– From May 29th to June 2nd, at the ICRA 2023 held in London, UK, the team competed in the competition that involved the localization and mapping (SLAM) technology. They achieved first place overall in LiDAR session as well as the first place in academia in the vision-only session.
The “Urban Robotics Lab @ KAIST” and “URL @ KAIST,” research teams led by Professor Myung Hyun, excelled at the HILTI SLAM Challenge held during the 2023 IEEE International Conference on Robotics and Automation (ICRA) in London, United Kingdom from May 29th to June 2nd.
This conference, with over 7,000 participants, is the largest academic event in the field of robotics.
The HILTI SLAM Challenge 2023 was part of the Future of Construction Workshop program, organized by HILTI from the Principality of Liechtenstein, the Oxford Robotics Institute at the University of Oxford, and the Robotics and Perception Group at ETH Zurich.
The competition aimed to develop robust SLAM algorithms that can accurately map challenging environments where conventional SLAM algorithms struggle due to limited construction features, narrow indoor spaces, and low-light conditions.
A total of 80 teams from prestigious international companies and research teams participated in this competition, which has become one of the renowned competitions within ICRA since its establishment in 2021.
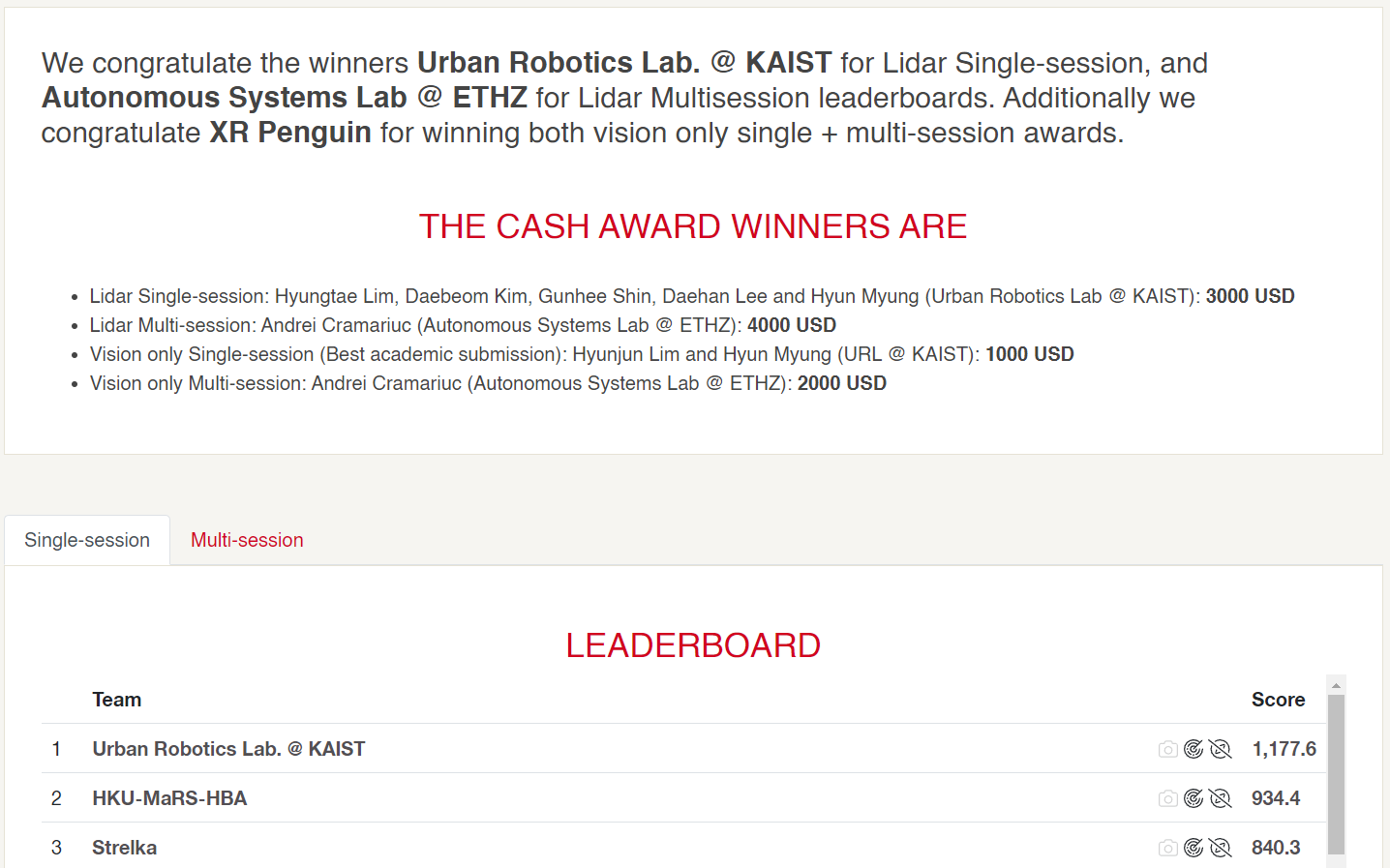
The research team achieved first place in the LiDAR session among a total of 63 teams by utilizing their self-developed Adaptive LiDAR-Inertial Odometry (AdaLIO) algorithm and various optimization frameworks (Pose Graph Optimization). In the vision field, they won first place in the academic category (second place overall) by employing their robust vision-inertial odometry algorithm (UV-SLAM) based on line features they developed.
They are also expected to receive a prize of 3,000 CHF (Swiss Francs) and 1,000 CHF, respectively.
Last year, the research team participated for the first time and received the second place in the academic category (fourth place overall).
Professor Myung expressed his thoughts on the achievement, stating, “This was a globally recognized opportunity for our self-developed SLAM technology, and I believe it will contribute to the advancement of the robotics industry by utilizing it in various autonomous driving, walking, and flying applications.”

The official leader board: https://hilti-challenge.com/leader-board-2023.html

명현 교수 연구팀, ICRA'23 HILTI SLAM Challenge 2관왕
KAIST 전기및전자공학부 명현 교수 연구실(Urban Robotics lab)의 “Urban Robotics Lab @ KAIST”와, “URL @ KAIST” 두 팀이 5월 29일부터 6월 2일 동안 영국 런던에서 개최된 로봇 분야 최대 규모 학술대회(참가자 7천여 명)인 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA) 내에서 개최된 힐티 슬램 챌린지(HILTI SLAM Challenge)에서 각각 전체 1위와 비전(vision) 분야 학계 1위의 성과를 거뒀다고 9일 밝혔다.
<HILTI SLAM Challenge 2023 수상팀. 왼쪽부터 명현 교수, 신건희 석사과정, 임현준 박사과정, 임형태 박사, 김대범 석사과정, 이대한 인턴 >
※ 팀 구성- Urban Robotics Lab @ KAIST (라이다 부문): 임형태 박사, 김대범, 신건희 석사과정, 이대한 인턴, 명현 교수 (KAIST)
- URL @ KAIST (비전 부문): 임현준 박사과정, 명현 교수 (KAIST)
힐티 슬램 챌린지 2023은 로봇 분야에서 가장 저명한 IEEE ICRA 학회의 미래 건설 워크샵 (Future of Construction Workshop) 프로그램의 일부로, 리히텐슈타인 공국의 힐티(HILTI) 사와 영국 옥스퍼드 대학의 옥스퍼드 로봇 연구소(Oxford Robotics Institute), 스위스 취리히 공대의 로봇 인지 그룹(Robotics and Perception Group)이 함께 주최했다.
본 대회는 공사환경이나 특징점이 부족한 좁은 실내 환경, 어두운 환경 등 기존 위치 측정 및 동시 지도화(Simultaneous Localization And Mapping, 이하 SLAM) 알고리즘이 동작하기 어려운 환경에서도 강인하게 동작할 수 있는 SLAM 알고리즘을 개발해 정확한 매핑을 하는 대회다. 본 대회에 총 80여 팀의 해외 유수 기업과 연구팀들이 참가했다.
특히, 이번 대회는 2021년도부터 꾸준히 개최되어, 현재는 ICRA 내의 대회 중에서도 저명한 대회 중 하나로 손꼽힌다.
연구팀은 자체 개발한 주변 환경의 특징에 따른 적응형 라이다-관성 주행계(AdaLIO: Adaptive LiDAR-Inertial Odometry) 알고리즘과 다양한 최적화 프레임워크(Pose Graph Optimization)를 활용해 라이다(LiDAR) 세션에서 총 63팀 중 전체 1위를 하였고, 비전 부문에서는 자체 개발한 직선 특징 기반의 강인한 비전-관성 주행계 알고리즘(UV-SLAM)을 활용해 학계 1위 (전체 2위)를 수상했다.
또한 부상으로 상금 3,000 CHF(스위스 프랑)와 1,000 CHF를 각각 받을 예정이다. 연구팀은 2022년에 처음 출전해 학계 2위 (전체 4위)를 수상한 바 있다.
참고로 SLAM 기술은 자율주행(자율차/자율로봇), 자율보행, 자율비행, 자율운항 등의 핵심이 되는 위치인식 및 맵 작성을 동시에 하는 기술이다.

<LiDAR 부문 1위 수상팀으로서, 제안한 SLAM 기술에 대한 초청 구두 강연 장면 (연사 임형태 박사)>
명현 교수는 “자체적으로 확보한 슬램(SLAM) 기술이 세계적으로 인정받는 기회였고, 이를 통해 다양한 자율 주행, 보행, 비행에 활용하여 로봇 산업 발전에 이바지 할 수 있으리라 생각한다”라고 수상 소감을 밝혔다.