


DreamSTEP team won championship at Quadruped Robot Challenge (ICRA'23)
Author
URL admin
Date
2023-06-15 21:44
Views
2212
Professor Myung Hyun’s research team ranks first, surpassing MIT and CMU.
– School of EE Professor Myung Hyun’s team wins the competition held at the world’s top robotics conference by building an autonomous quadruped walking system with their own developed technologies.
– A successful application of complete autonomous walking in challenging environments that is not easy to quickly complete even with direct human control via remote controller
– This feat is expected to be used not only in various industrial fields but also in environments of disasters where wireless communication is limited.
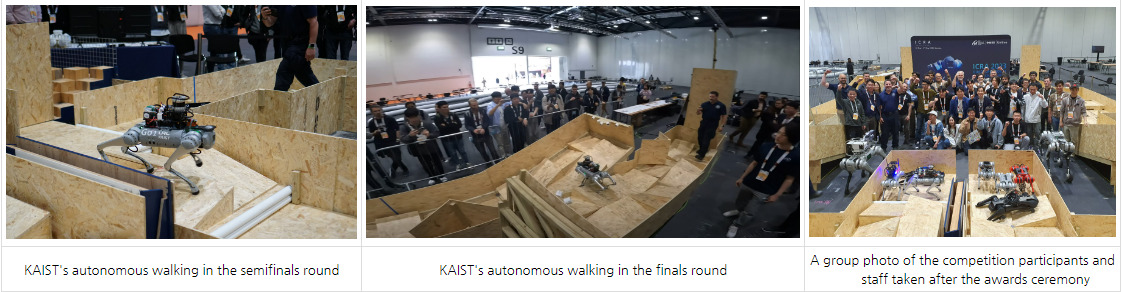
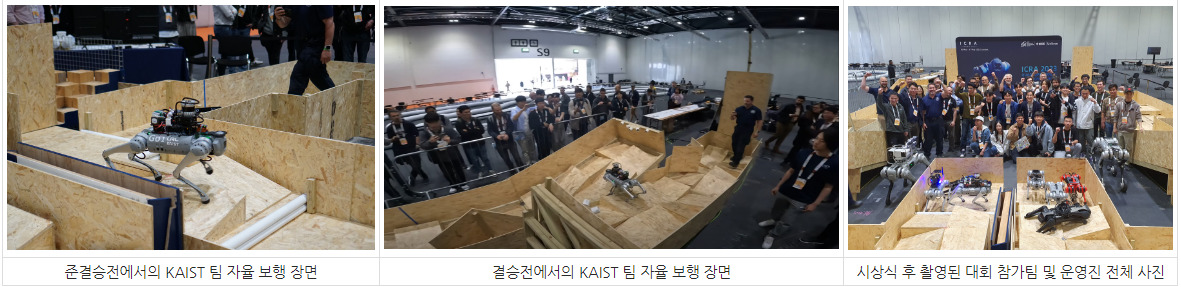
Recently, the KAIST autonomous walking robot, equipped with ‘DreamWaQ’ – a walking robot controller that can briskly climb stairs without the help of external visual or tactile sensors – has become a hot topic after winning first place at the IEEE International Conference on Robotics and Automation (ICRA) Autonomous Quadruped Robot Challenge (QRC).
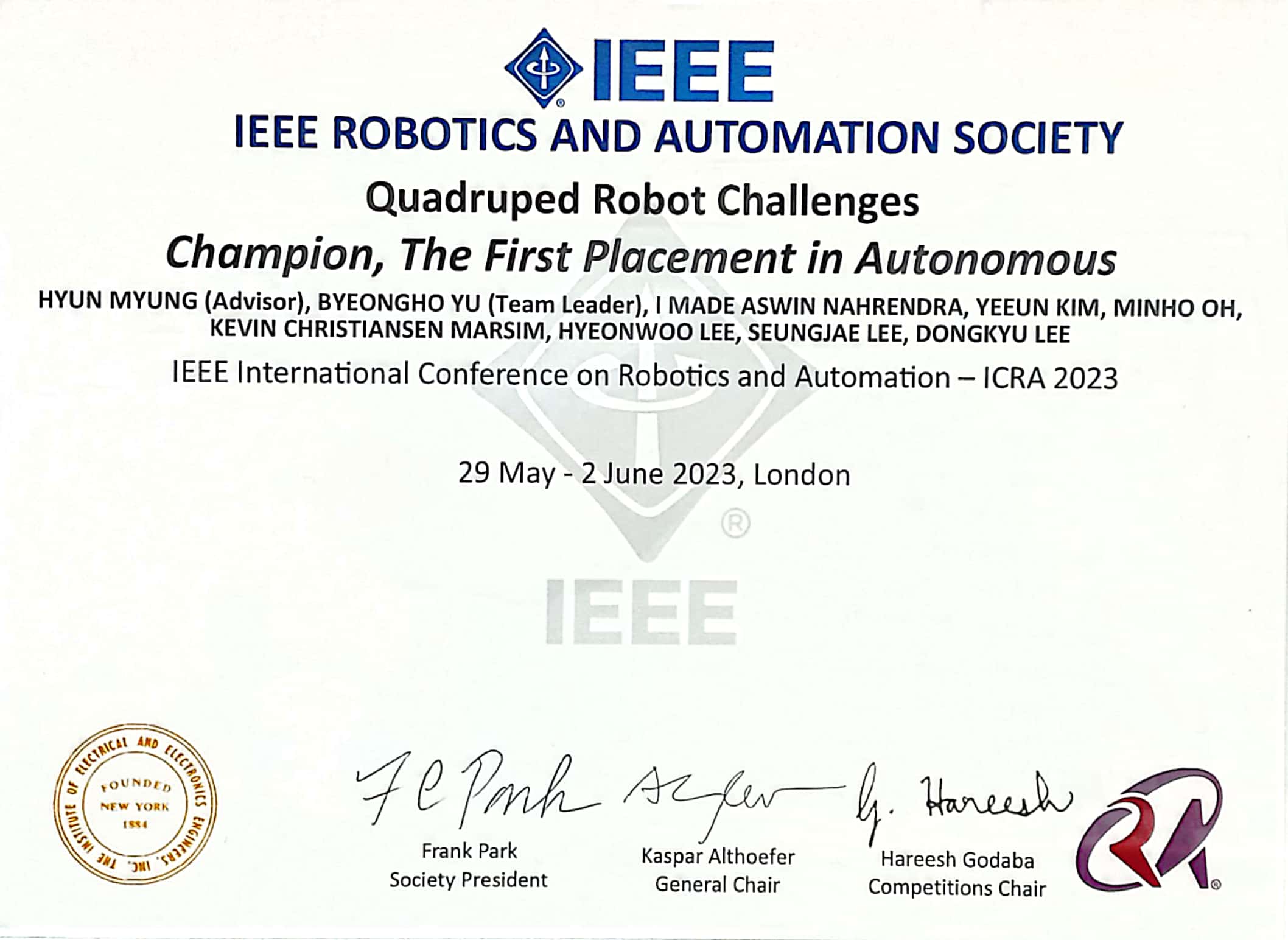
Professor Myung Hyun’s research team (Urban Robotics Lab) from the School of Electrical Engineering won the Quadruped Robot Challenge (QRC) hosted at the 2023 IEEE Conference on Robotics and Automation (IEEE ICRA), the largest academic conference in the field of robotics held in London, UK from May 29 to June 2, 2023. The team won on June 1st, local time, with a dominating performance.
This KAIST team independently developed and systematically integrated and optimized their technology, successfully demonstrating autonomous walking at QRC, where a total of 11 teams from around the world (including Korea, the United States, Hong Kong, Italy, and France) and 7 teams advanced to the main round. They scored a total of 246 points in the final round in which six teams participated. This score beats the 60 points earned by the Massachusetts Institute of Technology (MIT) by more than fourfold, essentially securing the KAIST team’s victory with an overwhelming difference (1st place: KAIST, Team DreamSTEP, 2nd place: MIT, 3rd place: Carnegie Mellon University (CMU)).
It is also worth noting that the KAIST team used a small quadruped walking robot, but it moved the fastest and scored the highest. In the finals, teams primarily using remote manual control recorded an average completion time of about 49 minutes, while the KAIST team recorded a completion time of 41 minutes and 52 seconds primarily through autonomous walking (the second-place MIT team took 45 minutes and 32 seconds using a remote control). The winning KAIST team was awarded a walking robot worth about 20 million won and is expected to receive a subsidy worth about 3 million won.
Professor Myung Hyun of KAIST stated, “All the technologies that allow us to perceive the environment around the robot and find appropriate paths, not just those limited to the controller used for ‘DreamWaQ’, were independently developed by our research team. We expect this technology will contribute to enhancing the competitiveness of the domestic robotics industry.”

명현 교수 연구팀, ‘드림워커’ MIT, CMU를 제치고 1위
– 전기및전자공학부 명현 교수팀, 독자적으로 개발한 기술들로 구성된 강인한 자율보행 시스템을 구축하여 로봇관련 세계 최고 학회에서 개최된 대회에서 우승– 사람이 직접 로봇을 보면서 조종해도 빠르게 완주하기 쉽지 않은 험준한 환경에서 완전한 자율보행 적용 성공
– 다양한 산업 현장 뿐 아니라, 무선 통신이 제한되는 재난 환경에서 로봇의 자율적 임무 수행 기대
최근 별도의 시각이나 촉각 센서의 도움 없이 계단도 성큼 오를 수 있는 보행로봇 제어기인‘드림워크(DreamWaQ)’를 장착한 KAIST 자율보행로봇이 국제 사족보행 로봇 경진대회에서 1등을 하여 화제다.
전기및전자공학부 명현 교수 연구팀(미래도시 로봇 연구실)이 ‘23. 5. 29 ~ 6.2 영국 런던에서 개최된 로봇 분야 최대 규모 학술대회인 2023 국제 로봇 및 자동화 학술대회(IEEE International Conference on Robotics and Automation, ICRA)에서 주최한 사족로봇 자율보행 경진대회(Quadruped Robot Challenge, QRC)에서 현지 시간 6월 1일 압도적인 점수 차를 보이며 우승을 거두었다.
KAIST 팀은 독자적으로 개발한 단위 기술들을 체계적으로 통합 및 최적화하여, 전 세계에서 한국을 포함한 미국, 홍콩, 이탈리아, 프랑스 등 총 11개 팀이 참여하고 7개의 팀이 본선에 진출한 QRC에서 성공적인 자율보행을 선보였으며 최종 6개의 팀이 참여한 결승전에서 총점 246점을 거두었다.
이는 60점을 획득한 메사추세츠 공과대학교(MIT)의 4배 이상으로, 사실상 압도적인 차이로 따돌리며 우승을 거머쥐었다 (1위: KAIST, Team DreamSTEP, 2위: MIT, 3위: 카네기멜론 대학(CMU)).
KAIST 팀은 소형 사족 보행 로봇을 사용하였으나 가장 빠르게 움직이며 가장 높은 점수를 획득하였다는 점도 주목할만하다.
결승전에서 원격 수동 조작을 위주로 한 팀들이 평균 약 49분의 완주 시간을 기록한 반면, KAIST 팀은 자율 보행 위주로 41분 52초의 완주 시간을 기록하였다 (2위 MIT는 원격조작으로 45분 32초).
동 대회에 우승한 본 연구팀은 약 2,000만원 상당의 보행 로봇을 수여 받았고, 약 300만원 상당의 보조금을 받을 예정이다.
KAIST팀의 명현교수는 “ 동 경진대회에서 사용된 제어기인 드림워크 뿐 아니라, 로봇 주변의 환경을 인지하고 적절한 경로를 찾을 수 있도록 하는 기술 모두 본 연구팀이 독자적으로 개발한 기술로, 국내 로봇 산업 경쟁력 제고에 이바지할 것으로 기대된다”고 전했다.

- KBS | 카이스트 연구팀, 국제 자율보행 로봇대회 우승
- MBC | 카이스트 사족보행 로봇 국제 경진대회 1등
- YTN | [라이브앵글] 세계 놀래킨 카이스트 사족보행 로봇...MIT 꺾은 비결은?
- JTBC | 카이스트 자율보행 로봇 '드림워크'…MIT 제치고 우승|D:이슈
- Arirang TV | "Dreamwalker" quadrupedal robot uses semi-autonomous abilities to walk without visual cues
- TV조선 | KAIST 자율보행로봇, MIT 제치고 국제 대회 우승
- MBN | 장애물 넘고 계단도 '껑충'...미국 MIT도 제친 '이것', 정체는?
- 조선일보 | KAIST가 MIT 눌렀다… 사족보행 국제 로봇 대회서 1등 (chosun.com)
- 중앙일보 | MIT 60점인데 KAIST는 무려…'로봇 자율보행' 압도적 세계1위
- 동아일보 | KAIST 자율보행로봇, MIT 제치고 세계 1위|동아일보 (donga.com)
-
파이낸셜 뉴스 | KAIST가 만든 로봇, MIT 제쳤다
-
AI타임즈 | KAIST, 사족보행 로봇 세계 대회서 우승