


AI-based autonomous robot navigation in cluttered indoor-outdoor environment
국가과제
Funding
KEIT
Period
2019.04. ~ 2022.12.
Views
3733
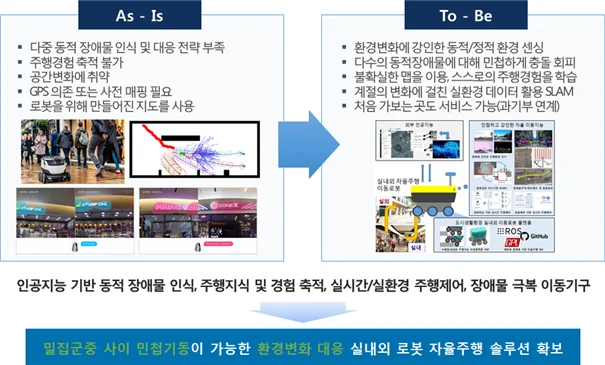
- 위치추정/맵 생성 및 지식경험 축적 모델링
- 정밀하지 않은 지도를 이용한 위치 인식 기술 개발
- 동적 환경에서의 SLAM 기초 기술 개발
- 기존의 지도와 새로 생성된 지도의 정합 기술 개발
- 동적 환경에서의 물체 인식 기반 및 SLAM 기술 개발
- 주행지식 및 경험 축적을 위한 모델링 기술 개발
- 동적 환경에서의 물체 인식 기반 SLAM 기술 고도화
- 주행지식 및 경험 축적을 위한 모델링 기술 고도화
- 동적 환경에서의 물체 인식 기반 SLAM 기술 안정화