


Vision-based SLAM for Autonomous Indoor Navigation
산업체과제
Funding
HD Keffico
Period
2022.03.01 - 2022.12.31
Views
1841
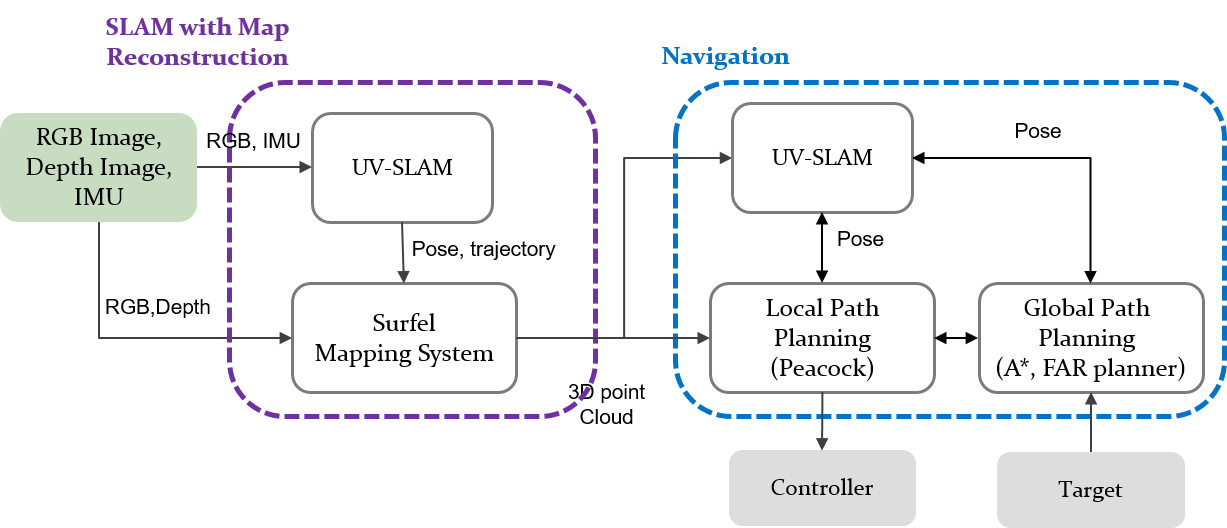
Title: 실내 자율주행을 위한 카메라 기반 SLAM & Navigation 개발
Objective: 실내 환경에서의 카메라 기반 SLAM 및 목표지점까지의 실시간 경로 생성에 대한 자체 시험수행을 통한 성능검증
Objective: 실내 환경에서의 카메라 기반 SLAM 및 목표지점까지의 실시간 경로 생성에 대한 자체 시험수행을 통한 성능검증