


- No.
- Name
- Spec.
- Photo
- Qty
- Year
- 99
- Unitree G1
- - Humanoid robot
- Payload: 3kg
- Dimensions 1320 x 450 x 200 mm (standing) & 690 x 450 x 300 mm (folding)
- RGB-D camera & 3D LiDAR
- PC: NVIDIA Jetson Orin -

- 1
- 2025
- 98
- Ricoh Theta Z1
- - Image sensor: 1.0" back-illuminated CMOS image sensor × 2
- File size (still images): RAW: 7296 × 3648, JPEG: 6720 × 3360
- File size and frame rate (videos): 3840 × 1920 / 29.97 fps, 1920 × 960 / 29.97 fps
- File size and frame rate (live streaming): 3840 × 1920 / 29.97 fps, 1920 × 960 / 29.97 fps
- Lens: Aperture: F2.1, F3.5, F5.6
- Lens construction: 14 elements in 10 groups × 2 -

- 1
- 2025
- 97
- Unitree Go2
- Quadruped robot
- Payload: 8kg
- Max Running Speed: 3.7m/s
- Foot Pressure Sensors
- ORIN NX/NANO
- 4D LiDAR L1
- 12 aluminum alloy precision joint motors -

- 1
- 2024
- 96
- ViperX 300 S
- - Degrees of Freedom: 6
- Reach: 750mm
- Span: 1500mm
- Working payload: 750g
- Weight: 3.6kg / 8lbs -

- 1
- 2024
- 95
- UGOT Robotic Kit
- - CPU: ARM Cortex A55
- Operating time: 2.5 hours
- Max speed: 1.6 m/s -

- 1
- 2024
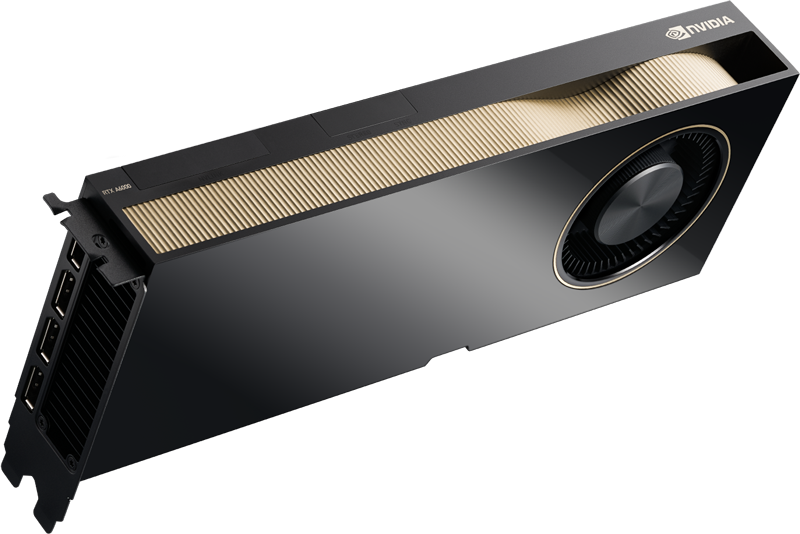
- 94
- Deep learning server10
- · NVIDIA RTX A5000
- 4 GPUs
- Memory Specs: 24GB/GPU
- CPU: AMD EPYC 7453 28-Core -

- 1
- 2024
- 93
- Autolabor Pro 1
- - Dimensions 726 x 617 x 273 mm
- Platform weight 40kg
- Max payload 50kg
- Max speed 0.8 m/s
- Endurance time 4 hours -

- 2
- 2024
- 92
- Deep learning server9
- · NVIDIA RTX A6000
- 3 GPUs
- Memory Specs: 48GB/GPU
- CPU: AMD TR Pro 5975WX
- RAM: Samsung DDR4 32GB x 8 (256GB)
- Memory: HDD 4TB / SSD 3.84TB -
- 1
- 2024
- 91
- TETRA DS-V
- · FDM(Fused Deposition Modeling)/FFF(Fused Filament Fabrication)
· Print Volume: 300 X 300 X 300 mm
· Print Speed: 100mm/s
· Resolution: 90~290 micron -

- 1
- 2024
- 90
- Agile-x Bunker pro
- - Dimensions 1064 x 845 x 473 mm
- Platform weight 180 kg
- Max payload 120kg
- IP rating IP67
- Max speed 1.5 m/s
- Max travel 15 km -

- 2
- 2023
- 89
- Livox MID-360
- · Detection Range (@ 100 klx)
- 40 m @ 10% reflectivity
- 70 m @ 80% reflectivity
· FOV: Horizontal: 360°, Vertical: -7°~52°
· Weight: 265 g
· Power: 6.5 W (average) -

- 8
- 2023
- 88
- Deep learning server8
- · NVIDIA RTX A5000
- 4 GPUs
- Memory Specs: 24GB/GPU
- CPU: AMD Ryzen Threadripper Pro 3955WX -

- 3
- 2023
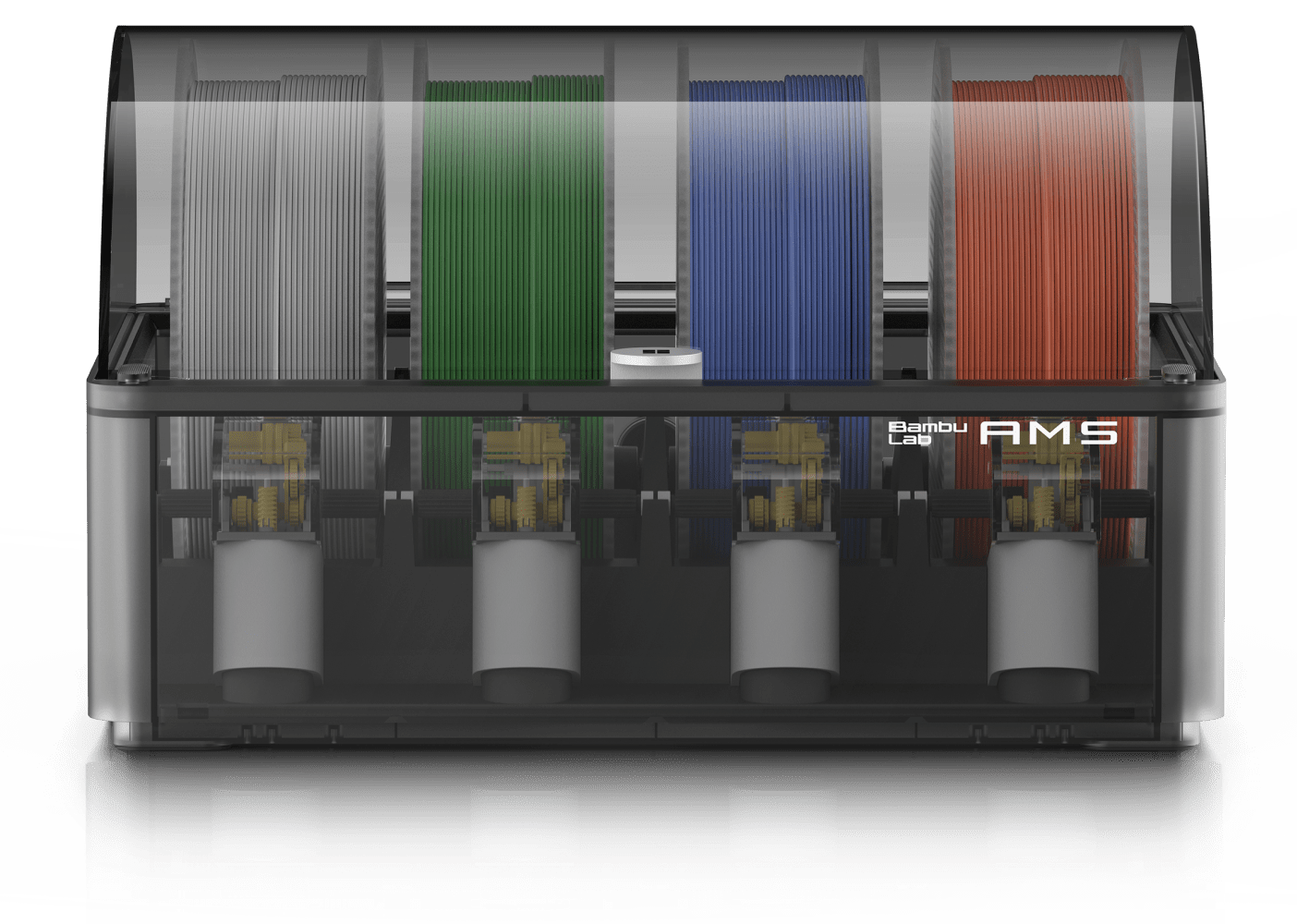
- 87
- Bambu Lab
X1-Carbon - · Multi Filament 3D Printer
· Technology: FDM (Fused Deposition Modeling)
· Dimensions: 389mm (W) x 389mm (D) x 457mm (H)
· Filament Compatibility : PLA, PETG, TPU, ASA, PVA, PET, ABS, PC, PA
· Print Volume: 255mm (W) x 255mm (D) x 255mm (H)
· Print Speed: 500mm/s -
- 1
- 2023
- 86
- DEV-22098 SparkFun
NVIDIA Jetson Orin Nano Developer Kit - · Dimensions 100 x 79 x 21mm
· GPU: NVIDIA Ampere architecture with 1024 NVIDIA® CUDA® cores and 32 Tensor cores
· CPU: 6-core Arm Cortex-A78AE v8.2 64-bit CPU 1.5MB L2 + 4MB L3
· Memory: 8GB 128-bit LPDDR5 68 GB/s
· Storage: external via microSD slot external NVMe via M.2 KeyM -

- 1
- 2023
- 85
- Livox Avia
- · Detection Range (@ 100 klx)
- 190 m @ 10% reflectivity
- 230 m @ 20% reflectivity
- 320 m @ 80% reflectivity
· FOV: 70.4° (Horizontal) ×77.2° (Vertical)
· Weight: 498 g (without cables)
· Power: 8 W (Startup: 16W) -

- 1
- 2022
- 84
- Livox MID-70
- · Detection Range (@ 100 klx)
- 90 m @ 10% reflectivity
- 130 m @ 20% reflectivity
- 260 m @ 80% reflectivity
· FOV: 70.4° (Circular)
· Weight 580 g
· Power: 8 W (average) -

- 1
- 2022
- 83
- Matrice 300 RTK
- · Dimension: 810×670×430 mm
· Weight: 3.6kg
· Ouster LiDAR OS0-32 -

- 1
- 2022
- 82
- Quadrotor
- · Dimension: 354x354x200mm
· Weight: 1.8kg
· Ouster OS0-32, D435i, pixhawk -

- 2
- 2022
- 81
- Drone F450
- · Dimension: 660x660x240mm
· Weight: 2.036kg
· D435i, pixhawk -

- 8
- 2022
- 80
- ZORTRAX M300
DUAL 3D printer - · Technology: LPD(Layer Plastic Deposition) Plus
· Print Volume: 265 X 265 X 300 mm
· Print Speed: 100mm/s
· Resolution: 150-200 micron -

- 1
- 2022
- 79
- Unitree Go1
- Quadruped robot
· Payload: 5kg
· Max Running Speed: 3.3m/s
· Endurance Time: 1-2.5hr
· Foot Pressure Sensors
· Fisheye camera
· Ouster LiDAR (OS0-128)
· Xsens-mti-30
· Realsense D435 -

- 2
- 2022
- 78
- ROSBOT2
- Autonomous robot platform
· CPU: Rockchip RK3288, Quad-core ARM Cortex-A17 32-bit processor, 1.8 GHz
· GPU: ARM Mali-T764 MP2
· RAM: 2GB LPDDR3
· IMU: MPU 9250 or BNO055 (accelerometer + gyro) -

- 3
- 2022
- 77
- Deep learning server7
- · NVIDIA GeForce RTX 3090
- 4 GPUs
- Memory Specs: 24GB/GPU
- CPU: AMD Ryzen Threadripper Pro 3955WX -

- 1
- 2022
- 76
- Deep learning server6
- · NVIDIA RTX A5000
- 4 GPUs
- Memory Specs: 24GB/GPU
- CPU: AMD Ryzen Threadripper Pro 3955WX -
- 1
- 2022
- 75
- Deep learning server5
- · NVIDIA GeForce RTX 3090
- 2 GPUs
- Memory Specs: 24GB/GPU
- CPU: AMD Ryzen 9 3900X -

- 1
- 2021
- 74
- INSTA360 ONE X2
- - Aperture: F2.0
- 35mm Equivalent Focal Length: 7.2mm
- ISO: Auto, 100-3200
- WB: Auto, 2700K, 4000K, 5000K, 6500K, 7500K
- Photo Resolution: 360(6080x3040) Pano(4320×1440)
- Bluetooth: BLE 4.2
- Wi-Fi: 802.11a/b/g/n/ac -

- 1
- 2021
- 73
- Xsens
MTi-620
- VRU
· Gytoscope
- Standard full range: 2000 deg/s
- Noise density: 0.007 º/s/√Hz
· Accelerometer
- Standard full range: 10g
- Noise density: 60 µg/√Hz
· Orientation accuracy
- Roll/pitch
Typ: 0.2 º (Static)
Typ: 0.25 º (Dynamic)
- Yaw: unreferenced, low drift -

- 1
- 2021
- 72
- Rover
Zero2
- · Dimensions: 62 x 39 x 25.4cm (L x W x H)
· Weight: 11kg
· Max Speed: 1.5m/s
· Max Payload Capacity: 50kg -

- 3
- 2021
- 71
- Unitree
A1
- Quadruped robot
· Payload: 5kg
· Max Running Speed: 3.3m/s
· Endurance Time: 1-2.5hr
· Foot Pressure Sensors
· Depth Camera
· RP LiDAR -

- 1
- 2021
- 70
- OpenCV AI Kit
OAK-D - Stereo Camera
· Main Camera Resolution: 4056 × 3040
· Stereo Camera Resolution: 1280 × 800 @ 120fps
· Object/Feature Tracking
· Motion Estimation
· Semantic Segmentation
· Spatial AI -

- 5
- 2021
- 69
- Husarion
Rosbot - Autonomous robot platform
· Intel Atom processor
· 4GB RAM
· RPLIDAR A3
· Orbbec Astra RGBD camera
· MPU 9250 inertial sensor
· VL53L0X time-of-flight distance sensor -

- 3
- 2020
- 68
- Intel D455
- Depth Camera
· Depth Technology: Active IR stereo
· Dimensions: 124 mm × 26 mm × 29 mm
· Recommended Range: From 0.4 to 6 m
· Minimum Depth Distance: 40 cm.
· Depth Stream Output Resolution
- 1280 × 720 @ 30fps
- 848 × 480 @ 90fps -

- 10
- 2020
- 67
- Intel T265
- Tracking Camera
· SLAM: V-SLAM, High precision VIO
· Intel® Movidius™ Myriad™ 2.0 VPU
· FOV: 163±5°
· IMU: BMI055 IMU
· Dimensions: 108 mm x 24.5 mm x 12.5 mm -

- 3
- 2020
- 66
- FLIR AX8
- Thermal Imaging Camera
· Packaging Size: 210 x 142 x 70 mm
· Accuracy: ±2°C (±3.6°F) or ±2% of reading
(+10 to +100°C at +10 to +35°C ambient)
· FOV: 48° × 37°
· IR Resolution: 80 × 60 pixels
· Object Temperature Range
: –10°C to +150°C
· Sensitivity: Minimum 10 Lux
without illuminator
· Thermal Sensitivity/NETD: < 0.10°C
@ +30°C (+86°F) / 100mK -

- 1
- 2020
- 65
- Xsens
MTi-30 - IMU
· Output frequency: Up to 2 kHz
· Latency: <2ms
· Orientation accuracy
- Roll/pitch
Typ: 0.2 º, Max: 0.4 º (Static)
Typ: 0.5 º, Max: 2.0 º (Dynamic)
- Yaw
Typ: 1.0 º -

- 2
- 2020
- 64
- Microsoft
Azure Kinect DK - · Dimensions: 126.00 x 103.00 x 39.00 mm
· Weight: 440g
· Sensors
- Depth camera: 1MP Time-of-flight
- RGB camera: 12MP CMOS sensor rolling shutter
- IMU: 3D digital accelerometer and a 3D digital
- gyroscope
- Microphone: 7-microphone circular array -

- 2
- 2020
- 63
- NVIDIA
Jetson AGX
Xavier - · Size: 105 mm x 105 mm x 65 mm
· GPU: 512-core Volta GPU with Tensor Cores
· CPU: 8-core ARM v8.2 64-bit CPU
, 8MB L2 + 4MB L3
· Memory: 32GB 256-Bit LPDDR4x | 137GB/s
· Storage: 32GB eMMC 5.1 -

- 2
- 2020
- 62
- Markforged
Mark Two
- Carbon Fiber 3D printer
· Dimensions: 580mm(W) x 330mm (D) x 355mm (H)
· Build Volume: 320mm(W) x 132mm (D)
x 154mm (H)
· Printing Process: continuous Fiber Reinforcement
(CFR)
· Z Layer Resolution: 100 μm - 200 μm
· Printing Media: Composite Base Filaments
, Continuous Fibers -

- 1
- 2020
- 61
- FLSUN
QQ-S
- 3D printer
· Machine Dimensions: 290 x 350 x 800 mm
· Technology: FDM
· Print size: 260 x 370 mm
· Print Speed: 300 mm /sec
· Filament Compatibility: ABS, PLA, HIPS, Flex
, Wood etc.
· Extruder Temperature: 270°C
· Heating Bed Temperature: 100°C -

- 1
- 2020
- 60
- Deep learning server4
- · CPU: AMD Ryzen 9 3900X
· GPU: 2 TITAN RTX -

- 2
- 2020
- 59
- Deep learning server3
- · CPU: Intel Xeon Silver 4210
· GPU: 3 TITAN RTX -

- 1
- 2020
- 58
- Novatel GPS
PwrPak7D-E1
- GPS
· Length (mm): 147
· Width/Diameter: 125
· Height(mm) : 55
· Weight(g): 510
· Accuracy
- Single Point L1:1.5m
- Single Point L1/L2: 1.2m
- SBAS : 0.6m
- DGPS(code): 0.4m
- RTK : 1cm + 1ppm -

- 1
- 2020
- 57
- Ouster-OS2
128 LiDAR - 128 3D LiDAR
· Vertical resolution: 128 channels
· Horizontal resolution : 512, 1024, or 2048
· Range : 240m
· Vertical field of view : 22.5º (±11.25º)
· Vertical angular resolution : 0.18º ~ 0.73º
· Precision : ±1.5 – 5 cm
· Points per second : 2,621,440
· Rotation rate : 10 or 20 Hz
-

- 2
- 2020
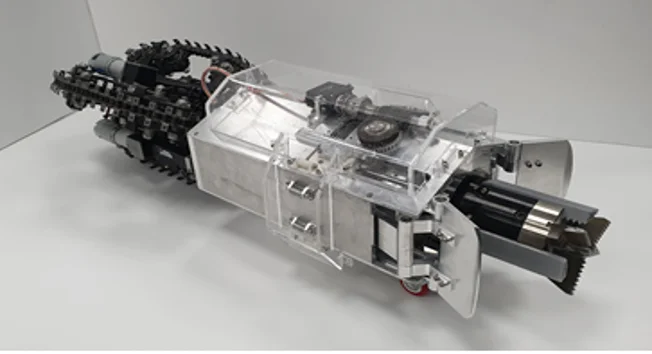
- 56
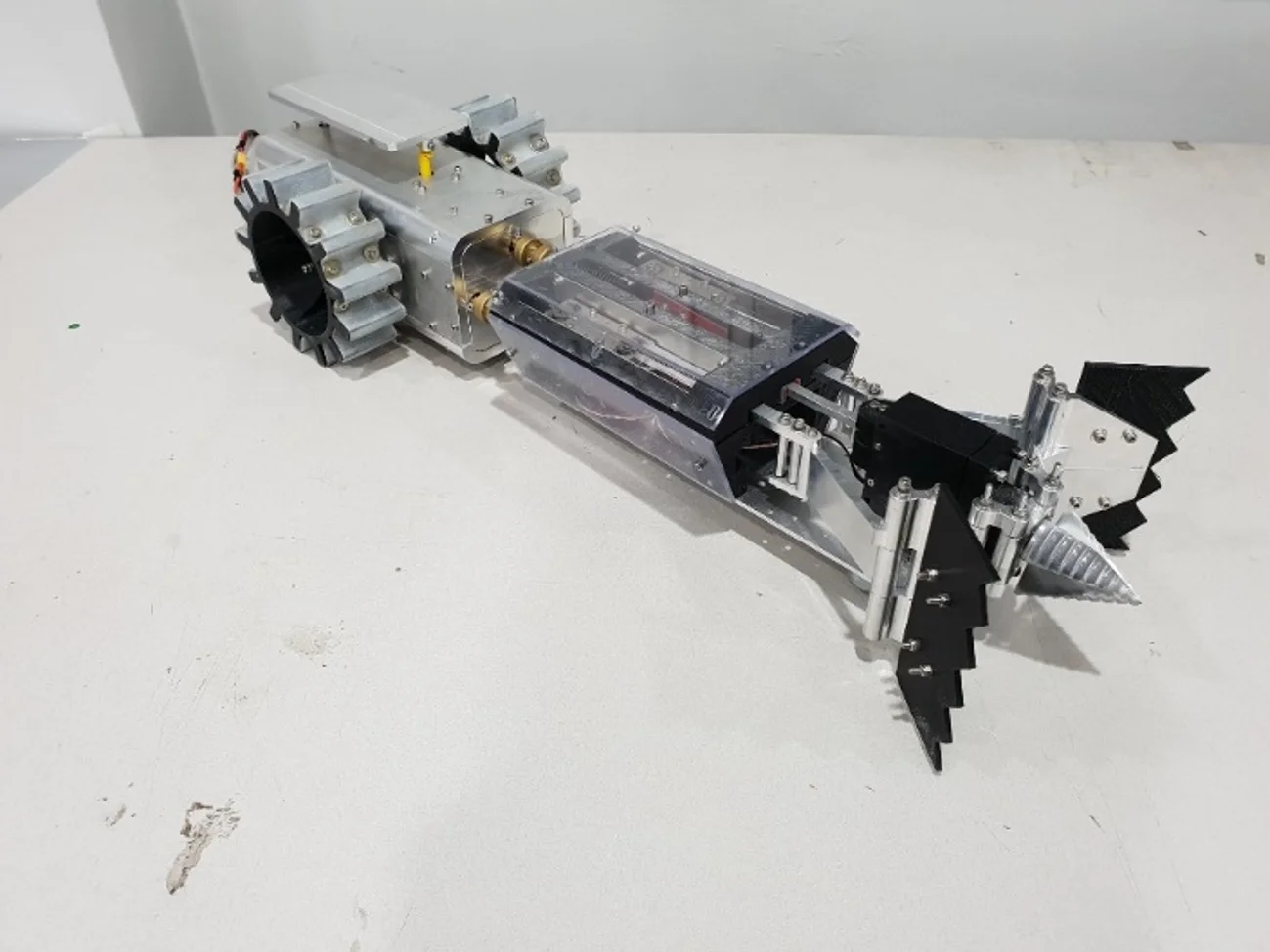
- Mole-bot
(Version. Ⅱ) - Bio-inspired embedded directional drilling robot
(Version. Ⅱ)
· Dimension: Ø 250 mm × 840 mm
· Weight: 26 kg
· Excavation speed: 1.46 m/hr
· Directional angle: < 38°/100 ft
· Localization accuracy: 6.03 cm
· Angular estimation: 0.4° -
- 1
- 2020
- 55
- iniVation
DAVIS 346 - Event camera
· DVS Resolution: 346 x 260 pixels
· Frame Resolution: 246 x 260 pixels,
Grayscale, simultaneous output with DVS
· DVS Dynamic range: 120 dB
· Min. latency: ~20 us
· Dimension: H 40 x W 60 x D 25 [mm]
· Weight: 100g (without lens)
· IMU: 6-Axis Built-in -

- 1
- 2019
- 54
- iniVation
DVS 240 - Event camera
· DVS Resolution: 240 x 180 pixels
· Frame Resolution: 240 x 180 pixels,
Grayscale, calibration mode only
· DVS Dynamic range: 120 dB
· Min. latency: ~12 us
· Dimension: H 40 x W 60 x D 25 [mm]
· Weight: 75g (without lens)
IMU: 6-Axis Built-in -

- 1
- 2019
- 53
- Intel RealSense
D435i - Depth camera
· Maximum Range: Approx. 10m
· Depth Field of view (FOV)
: 87°±3° × 58°±1° × 95°±3°
· Depth Output Resolution & Frame Rate:
Up to 1280 × 720 active stereo depth resolution.
Up to 90 fps
· RGB Sensor Resolution: 1920 x 1080
· RGB Sensor FOV: 69.4° × 42.5° × 77° (±3°)
· RGB Frame Rate: 30 fps -

- 18
- 2019
- 52
- HUSKY
- · External dimensions: 990x670x390mm
· Internal dimensions: 296x411x155mm
· Weight: 50kg
· Maximum payload: 75kg
· Max speed: 1.0m/s
· Run time: 3hr
· VLP16, Xsens-mti-30, Ocam -

- 1
- 2019
- 51
- Self-Driving Car
- Hyundai i30
-

- 1
- 2019
- 50
- Ouster OS1
- 3D LiDAR
· Height: 74mm
· Diameter 80mm
· Mass: 396g
· Channels: 64
· Range: 105m (80%), 40m (10%)
· Field of View: 33.2° (vertical),
360° (horizontal) -

- 2
- 2019
- 49
- DJI
Mavic2Pro - Drone
· Dimension: 91x214x84mm
· Hasselblad L1D-20c Camera
· Flight time: Max. 31mins
· Omnidirectional obstacle sensing
· 3-Axis Gimbal
· ActiveTrack2.0 -

- 1
- 2019
- 48
- Arduiono Uno
R3 CH340
- Arduino Uno board
· microprocessor: ATmega328
· operating voltage: 5V, input voltage: 7-13V
· Digital I/O pin: 14 (PWM pin: 6)
· Analog pin: 6
· DC current per I/O pin: 40mA
· Clock speed 16MHz -

- 15
- 2018
- 47
- Arduino RC car
frame full set - Arduino line tracer
· L911OS motor driver
· 1 ultrasonic sensor
· 9V battery
· Servo motor: SG-90 -

- 15
- 2018
- 46
- OptiTrack
Prime13 - Indoor positioning system
· Dimension: 6.86(W)x6.86(H)x5.3(D)
· Weight: 0.32kg
· Resolution: 1280x1024
· Pixel size: 4.8 µm × 4.8 µm
· Frame rate: 30-240 FPS -

- 6
- 2018
- 45
- Mole-bot
(Version. Ⅰ) - Embedded directional drilling robot
(Version. Ⅰ)
· Embedded directional drilling robot
· Dimension: 680(L)×220(W)×135(H)mm3
· Weight: 6kg
· Excavation speed: 30.7cm/hr
· Directional angle: <24.8°/100m
· Localization accuracy: ±12.5cm
· Angular estimation: ±2.4° -
- 1
- 2018
- 44
- Marvelmind
Indoor
Navigation
System
- Indoor positioning system
· Dimension: 55x55x33 mm
(with 50mm antenna: 55x55x65mm)
· Weight: 27g -

- 8
- 2018
- 43
- Deep learning
server2 - · CPU: Xeon E5-2650
· GPU: 3 TITAN V, TITAN RTX -

- 1
- 2018
- 42
- TurtleBot2
- · Kobuki Base
· Asus Xion Pro Live
· Netbook (ROS Compatible)
· Kinect Mounting Hardware
· TurtleBot Module Plate with 1inch Spacing
Hole Patterns -

- 2
- 2018
- 41
- JACKAL
- · External dimensions: 508x430x250mm
· Internal dimensions: 250x100x85mm
· Weight: 17kg
· Maximum payload: 20kg
· Max speed: 2.0m/s
· Run time 4hr
-

- 3
- 2018
- 40
- CAROS v3
(Climbing Aerial
Robot System)
with arm
- · Dimension: 1m
· Payload: 1~2kg
· Flight time: Max. 20mins
· Weight: 7.5kg
· Wind tolerance: < 12.5m/s -

- 1
- 2018
- 39
- CAROS v2
(Climbing Aerial
Robot System)
- · Dimension: 0.6m
· Payload: 0.2~0.3kg
· Flight time: Max. 10mins
· Weight: 3.0kg -

- 1
- 2018
- 38
- Ultraleap
Leap Motion
Controller
- Optical hand tracking module
· 80mm L x 30mm W x 11.3mm H
· Depth between 10cm to 60cm preferred,
up to 80cm maximum
· Field of view: 140×120° typical field of view -

- 1
- 2017
- 37
- Windowmate
RT-22 - Window cleaning robot
· 3kg
· 258mm x 250mm 56mm
· Window thickness: 17-22mm -

- 1
- 2016
- 36
- Algal Removal
RObot System
(ARROS) - · Motor: Endura C2
· GPS: ublox
· IMU: EBIMU-9DOF
· 3G Modem: snapdragon S3
· Zigbee: EZbee-M100
· SBC: Core i7
· Microprocessor: Aduino Mega
· Dimension: 2.5x1.1x0.6 m
· Weight: 30kg
· Maximum speed: 2m/sec
· Dimension: 1.0x0.6x0.4 m
Weight: 15kg -

- 1
- 2016
- 35
- FAROS
(Fire-proof
Aerial Robot
System)
- · Dimension: 0.9m
· Payload: 0.5~1kg
· Flight time: Max. 15mins
· Weight: 4.0kg -

- 1
- 2016
- 34
- Deep Learning
Server1 - · CPU: i7-6700K
· GPU: GTX1080
· RAM: 32GB(16GBx2)
· SSD: Samsung 850 EVO -

- 1
- 2016
- 33
- Velodyne
VLP-16 PUCK - · Dual Returns
· 830grams
· 16 Channels
· 100m Range
· 300,000 Points per second
· 360 Horizontal FOV -

- 3
- 2016
- 32
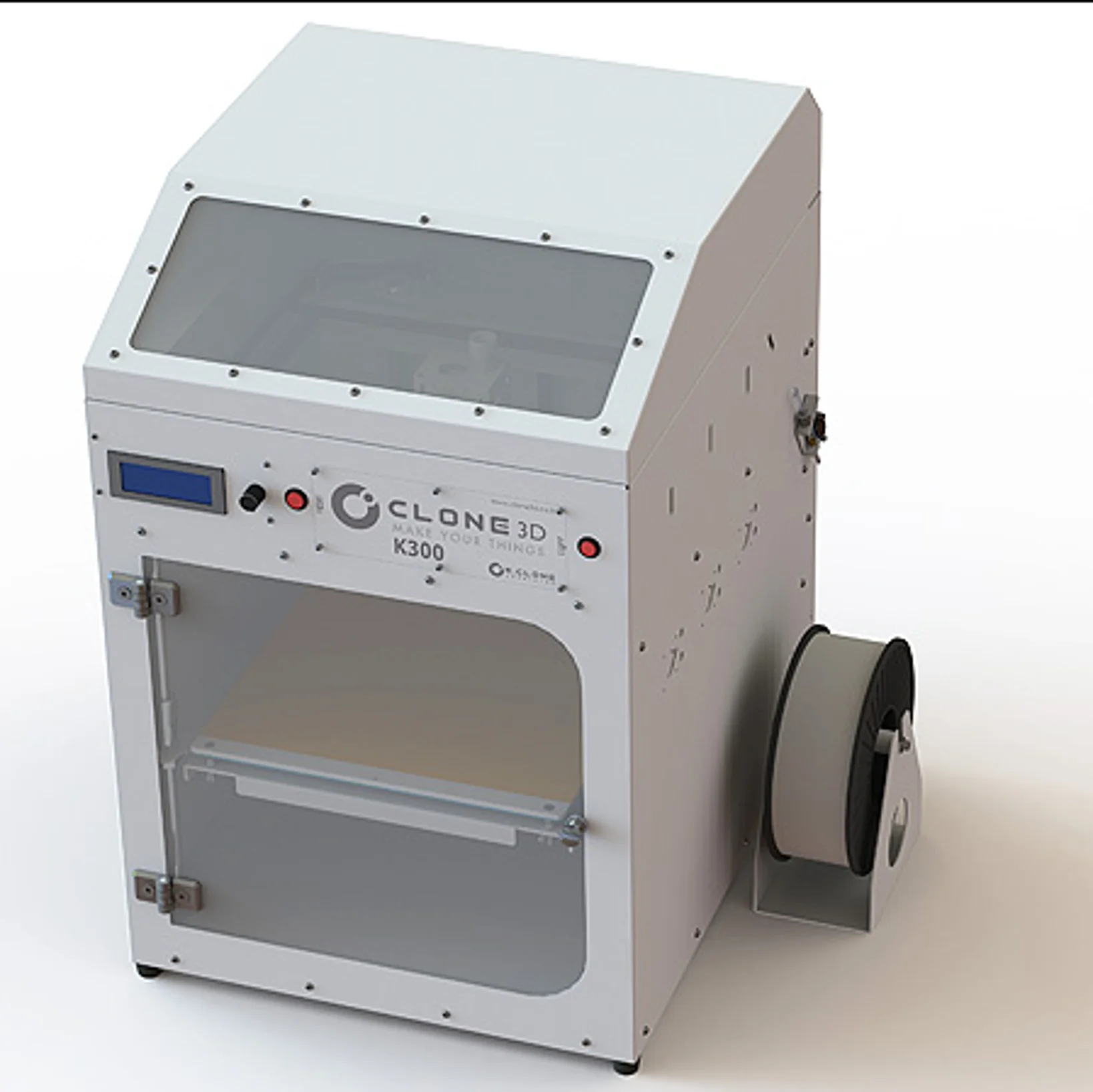
- Clone3D
Lm300s - 3D Printer
· FDM( Fused Deposition Modeling)
/ Thermoplastic extrusion/ coreXY mechanism
· Printer size: 450 x 520 x 660mm
· Weight: 37kg
· Print size: 300 x 300 x 300 mm
· Layer size: 0.01~0.3mm -
- 1
- 2016
- 31
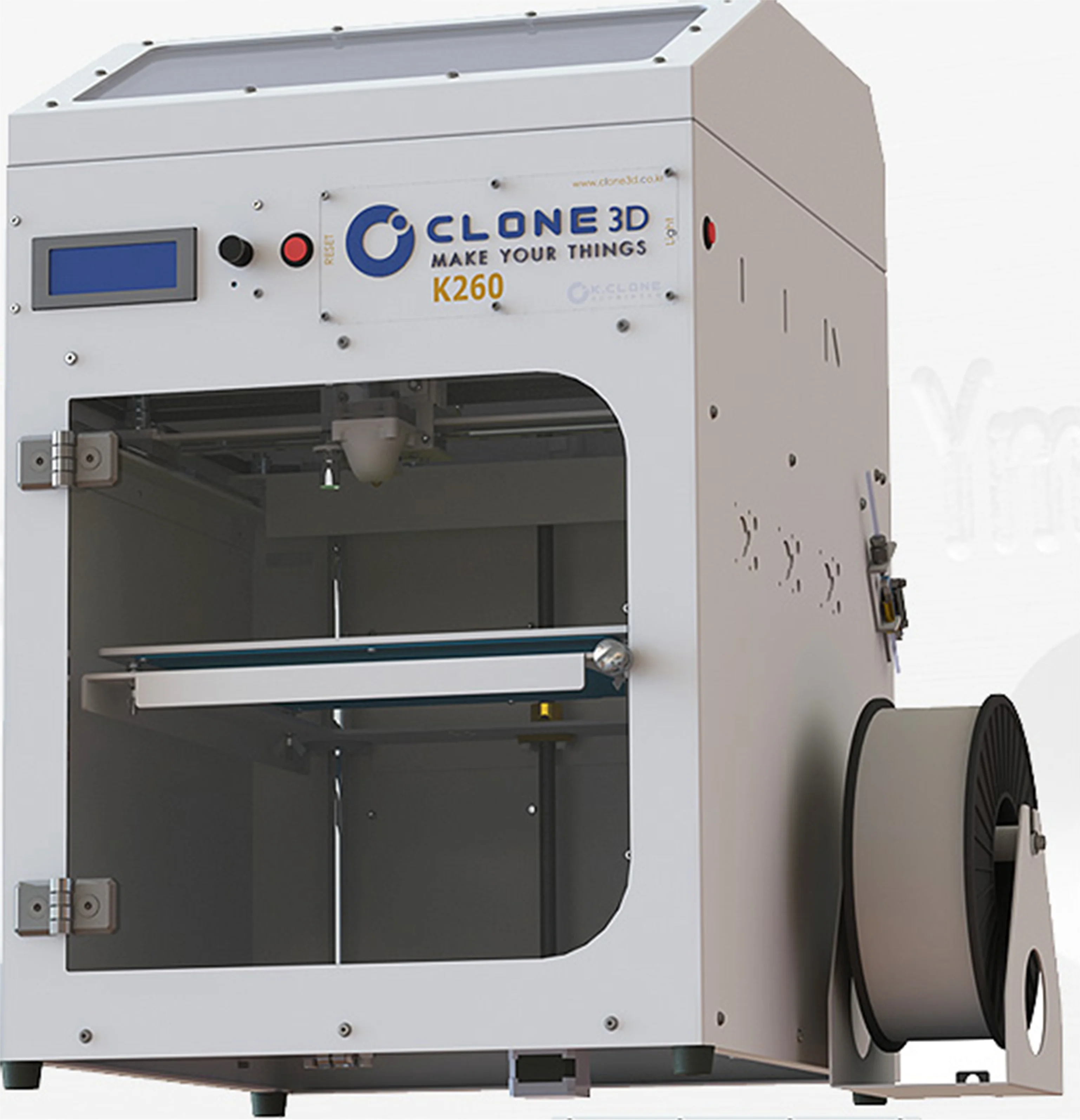
- Clone3D
Lm260s - 3D Printer
· FDM( Fused Deposition Modeling)
/ Thermoplastic extrusion/ coreXY mechanism
· Printer size: 410 x 480 x 620mm
· Weight: 30kg
· Print size: 260 x 260 x 260 mm
· Layer size: 0.01~0.3mm -
- 2
- 2016
- 30
- DJI
Matrice 600
- Hexarotor drone
· Dimension: 1.6x1.5x0.7 m
· Payload: 6kg
· Flight time: Max. 40mins
· Weight: 10kg
· Wind tolerance: < 6m/s -

- 2
- 2016
- 29
- DJI
Matrice 100 - Quadrotor drone
· Dimension (mm): 650x650
· Flight time: 20~30 mins
· Wind resistance: 10m/s
· Flight controller: DJIN1
· Weight: approx. 2400g -

- 2
- 2015
- 28
- HexH2o
- Hexarotor drone
· Dimension (mm): 650 x 740 x 240
· Weight: 4500g
· Hexa-rotor (with 6 props.)
· Flight controller: DJI NAZA V2
· Flight time: 20-25 mins
· Fully waterproof Manoeuver on the water -

- 1
- 2015
- 27
- CAROS v1
(Climbing Aerial
Robot System)
- · Dimension: 0.8m
· Payload: 0.3~0.5kg
· Flight time: Max. 15mins
· Weight: 3.5kg -

- 1
- 2015
- 26
- JEROS
: Conveyor type - · Motor: Endura C2
· GPS: OEM Star
· IMU: EBIMU-9DOF
· 3G Modem: snapdragon S3
· Zigbee: EZbee-M100
· SBC: Core i7
· Microprocessor: TMS320F2808
· Dimension: 1.5x1.1x0.8 m
· Weight: 45kg
· Maximum speed: 1.8m/sec
· Dimension: 1.2x0.4x0.3 m
· Weight: 40kg -

- 1
- 2014
- 25
- 3DISON
(3D Printer) - · Maximum printable size (mm):
225 x 145 x 150
· Minimum thickness: 0.4mm
· Printing material: PLA -

- 1
- 2013
- 24
- Pioneer 3-AT
- 4 wheeled mobile robot
· Dimension(mm): 497 * 277 * 508
· Robot Weight: 12Kg
· Max Linear Speed: 0.7m/s
· Max Angular Speed: 140deg/s
· Operating Payload: 12Kg(floor) -

- 1
- 2013
- 23
- Quadrotor
(AR-Drone 2.0) - · Dimension: 451 x 517 mm
· 4 brushless inrunner motors. 14.5W 28,500 RMP
· HD Camera. 720p 30fps
· 1GHz 32 bit ARM Cortex A8 processor with
800MHz video DSP TMS320DMC64x -

- 1
- 2013
- 22
- JEROS ver3
- · Motor: Endura C2
· GPS: OEM Star
· IMU: EBIMU-9DOF
· 3G Modem: snapdragon S3
· Zigbee: EZbee-M100
· SBC: Core i7
· Microprocessor: TMS320F2808
· Dimension: 1.5x1.1x0.8 m
· Weight: 45kg
· Maximum speed: 1.8m/sec
· Dimension: 1.2x0.6x1.2 m
· Weight: 40kg -

- 1
- 2012
- 21
- JEROS ver2
- · Motor: Model-300 (Tecnadyne)
· GPS: OEM Star
· IMU: EBIMU-9DOF
· 3G Modem: snapdragon S3
· Zigbee: EZbee-M100
· SBC: Core 2 Duo board
· Microprocessor: TMS320F2808
· Dimension: 1.5x1.1x0.8 m
· Weight: 80kg
· Maximum speed : 1 m/s
· Dimension: 1.1x0.3x1.0
· Weight: 3kg -

- 1
- 2012
- 20
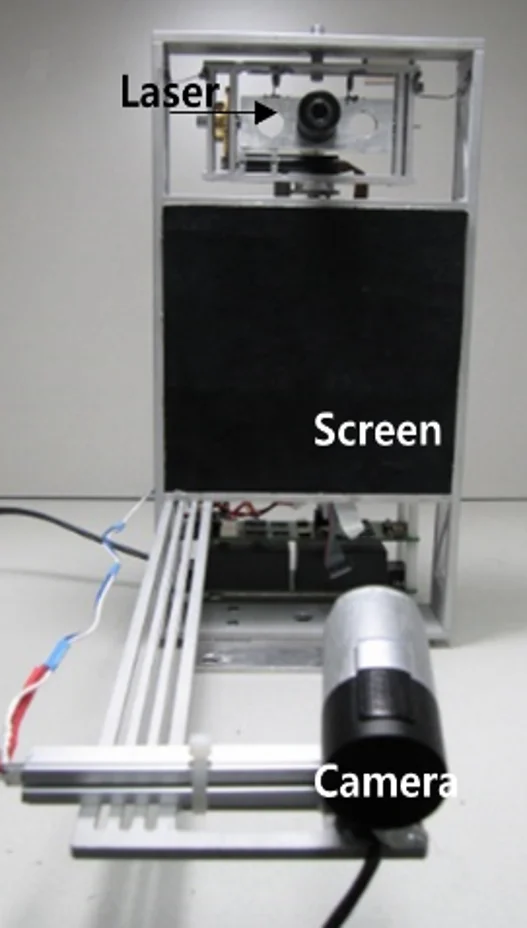
- SHM ver3
- 6-DOF Displacement Measurement System
· Dimension: 160x310x300mm (WxHxD) -
- 1
- 2012
- 19
- Swarm Robot
(CNRobot) - 4-wheel mobile robot
· Dimension: 192*197*79.5 m
· Maximum speed: 0.5m/s
· Operation: UART(RS232), Bluetooth -

- 3
- 2012
- 18
- Quadrotor
- · Dimension: 0.8x0.8 m
· Weight: 1.5kg -

- 1
- 2012
- 17
- JEROS ver1
- · Motor: BTD150
· GPS: OEMV-1G
· IMU: Mysen-B
· Camera: DIVECAM-550C
· SBC: Atom board
· Microprocessor: TMS320F2808
· Dimension: 0.6x1x0.5m
· Weight: 35kg -

- 1
- 2012
- 16
- SHM ver2
- 6-DOF Displacement Measurement System
· Dimension: 200x300x300mm (WxHxD) -
- 1
- 2011
- 15
- D-Project
- Biped walking robot
· Geared BLDC motor x 10, DSP(TMS320F28335) x 7
· Dimension: 0.052x0.035x0.115 m
· Weight: 0.425 kg -
- 1
- 2011
- 14
- KAURO
- Autonomous Underwater Robot
· Thruster: Tecnadyne 300 x 2, Seabotix BTD 150 x 4
· IMU: MicroStrain 3DM GX1
· Pressure sensor: Measurement Specialties
UltraStable 300 x 1,
· Frame: acryl cylinder hull x 2, aluminum plate x 2
, turtle head, tail, shell
· Dimension(m3): 0.52x0.62x0.25
· Weight: 37 kg
-

- 1
- 2011
- 13
- SHM ver1
- 6-DOF Displacement Measurement System
· Dimension: 400x400x800mm (WxHxD) -
- 1
- 2010
- 12
- HBE-ROBOCar
-Vision - Vision sensing 4-wheeled mobile robot
· Mobile platform : Atmega128 1ea,
ultrasonic sensor 2ea, accelerometer sensor 1ea,
PSD sensor 1ea, phototransistor 8ea,
· Motor driver(L298P) 2ea, DC geared motor &
encoder 2ea, 11.1V 5200mA LiPo battery 1ea
· Image transmitter: CMOS image sensor(30fps)
, 2.4~2.5 GHz RF communication
, Tx antenna(robot to pc)
· Image receiver: USB(receiver to PC interface)
, Rx antenna(robot to PC)
· Pan/tilt servomotor: HMI protocol & PWM interface
, 6V input voltage, 0.2sec/60˚, max 180˚
, 55g/40*20*47 mm -

- 1
- 2010
- 11
- Tango
(Samsung) - 2-wheel cleaning robot
· Dimension: 0.35x0.079 m
· Weight: 3.2kg -

- 1
- 2010
- 10
- Roomba
(iRobot) - 2-wheel cleaning robot
· Dimension: 0.36x0.09 m
· Weight: 3.4 kg -

- 1
- 2010
- 9
- HBE
-RoboMotor-SE - Motor and sensor control kit
· CPU: ATmega128-8AC
· Step motor: SST42D1100
· Wheel module: RB-35GM * 2, HSR-8498HB
· Vision module: AX-12+ * 2, Camera, Speaker
, Microphone, Odor sensor
· Manipulator module: HSR-8498HB * 5
, pressure sensor
· US module: Transmitter, Receiver -

- 2
- 2010
- 8
- MyRobot
- Educational robot kit
· Motor, LCD display, IR sensor, LED module -

- 47
- 2010
- 7
- Lamborghini C-1
CAT RC boat - Manufacture: Kyosho
· Length: 1.075m
· Width: 0.27m
· Weight: 3.6kg
· Engine: GXR28MR
· Propeller: D42 x P1.4 -

- 1
- 2010
- 6
- Huboway
- 2-wheel Segway-type mobile robot
· Dimension: 0.342x0.36x1.5 m -

- 1
- 2009
- 5
- Test ship for
Mobile Harbor - 1/60 size model ship
· Catamaran type
· Dimension: 1280x550 mm -
- 1
- 2009
- 4
- Robotis
Bioloid
Premium - Educational humanoid robot
· http://www.robobuilder.net -

- 1
- 2009
- 3
- RobotBuilder
Creator
5720T - Educational humanoid robot
· http://www.robobuilder.net -

- 1
- 2009
- 2
- e-Puck
- Educational robot (EPFL)
· Diameter: 70mm
· Height: 55mm
· Weight: 150g
· Processor: dsPIC 30F6014A,
60MHZ (~15MIPS)
· Motors:
2 stepper motors (50:1 gear)
· Speed: Max 15 cm/s
· Simulation: Webots -

- 1
- 2008
- 1
- VC-RE70V
(Samsung)
- 2-wheel cleaning robot
· Dimension: 0.360x0.105 m
· Weight: 4.5kg
-

- 2
- 2008